
Journal of Geodesy and Geoinformation Science ›› 2021, Vol. 4 ›› Issue (3): 49-59.doi: 10.11947/j.JGGS.2021.0305
• Special Issue • Previous Articles Next Articles
Yanjun WANG1,2,3( ),Shaochun LI1,2,3,Mengjie WANG1,2,3,Yunhao LIN1,2,3
),Shaochun LI1,2,3,Mengjie WANG1,2,3,Yunhao LIN1,2,3
Received:2020-12-14
Accepted:2021-01-15
Online:2021-09-20
Published:2021-10-09
About author:Yanjun WANG (1984—), male, PhD, associate professor, majors in LiDAR remote sensing and environmental modeling application. E-mail: Supported by:Yanjun WANG,Shaochun LI,Mengjie WANG,Yunhao LIN. A Simple Deep Learning Network for Classification of 3D Mobile LiDAR Point Clouds[J]. Journal of Geodesy and Geoinformation Science, 2021, 4(3): 49-59.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
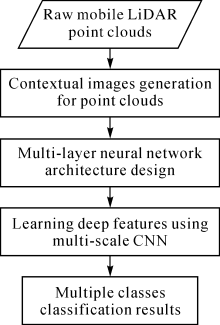
Fig.1
Our methodology framework"
Tab.1
The overview numbers of labelled each class in the datasets"
| Set | Total | Ground | Building | Car | Tree | Curb | Fence | Street light | Utility pole | Electrical wire |
|---|---|---|---|---|---|---|---|---|---|---|
| S1 | 1050774 | 447822 | 257125 | 18527 | 260738 | 22368 | 34199 | 3596 | 3980 | 2419 |
| S2 | 1074792 | 561797 | 177267 | 13206 | 125464 | 1633 | 186343 | 1913 | 4778 | 2391 |
| S3 | 975256 | 497100 | 137812 | 8526 | 207427 | 31429 | 80787 | 2907 | 3301 | 5967 |
| S4 | 724598 | 377269 | 129863 | 9879 | 129543 | 29026 | 37582 | 1181 | 5712 | 4543 |
| S5 | 713367 | 309787 | 102062 | 10898 | 247539 | 36597 | 1070 | 1921 | 2962 | 531 |
| S6 | 1239388 | 595236 | 355448 | 18288 | 255966 | 1122 | 1274 | 1598 | 7083 | 3373 |
| S7 | 1452821 | 772333 | 353405 | 28944 | 241177 | 0 | 43630 | 2023 | 7886 | 3423 |

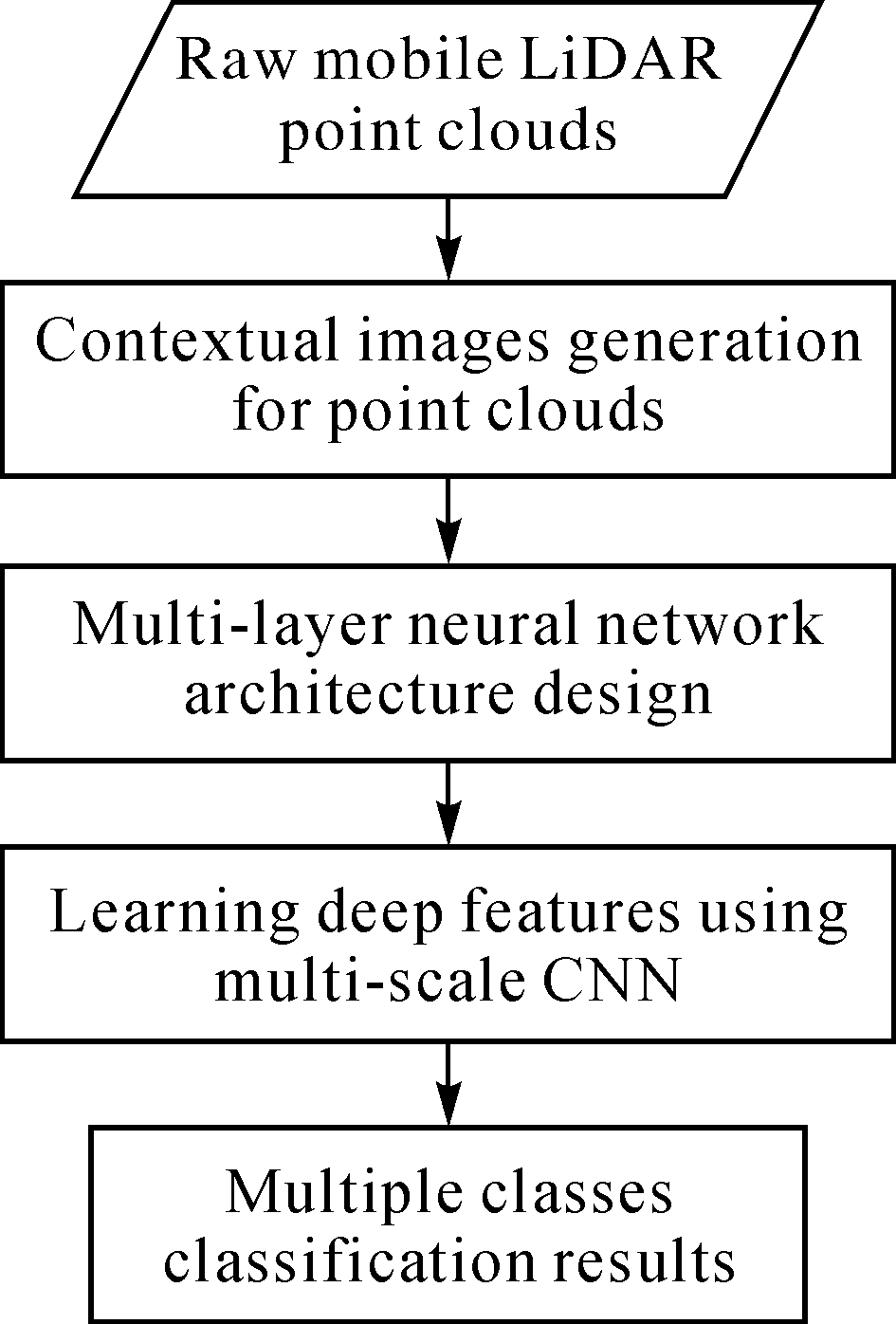
Fig.2
The 3D overview of the seven study datasets (In these datasets, we manually labeled each MLS point into one of nine categories, including ground, building, fence, utility pole, tree, electrical wire, street light, curb, and car)"
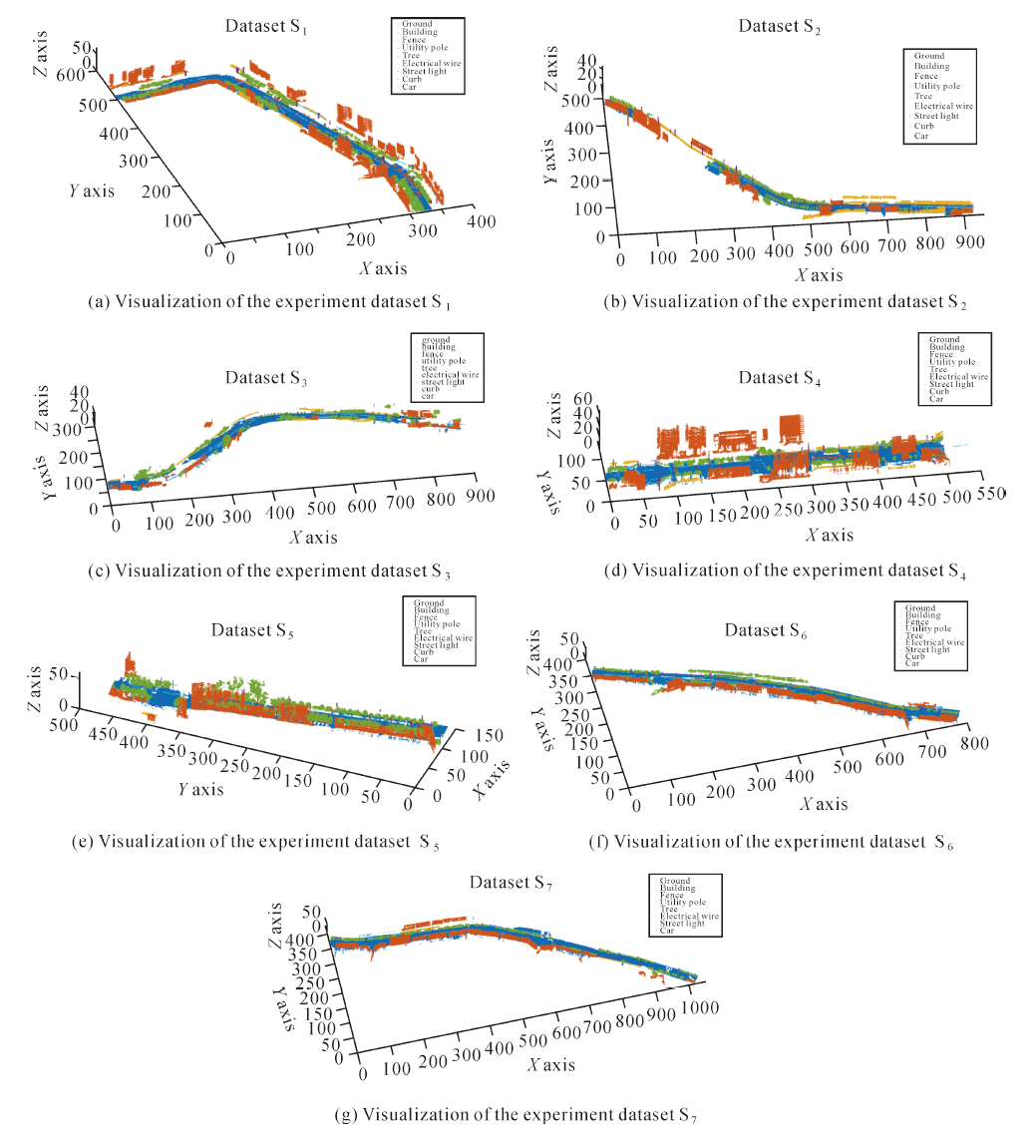

Fig.3
The neighboring points and different projected grids of point p0(The gray points are the raw MLS points; the red circle point is p0; the blue solid points are the neighboring points of p0; and the gray grids are generated by projected on different planes)"
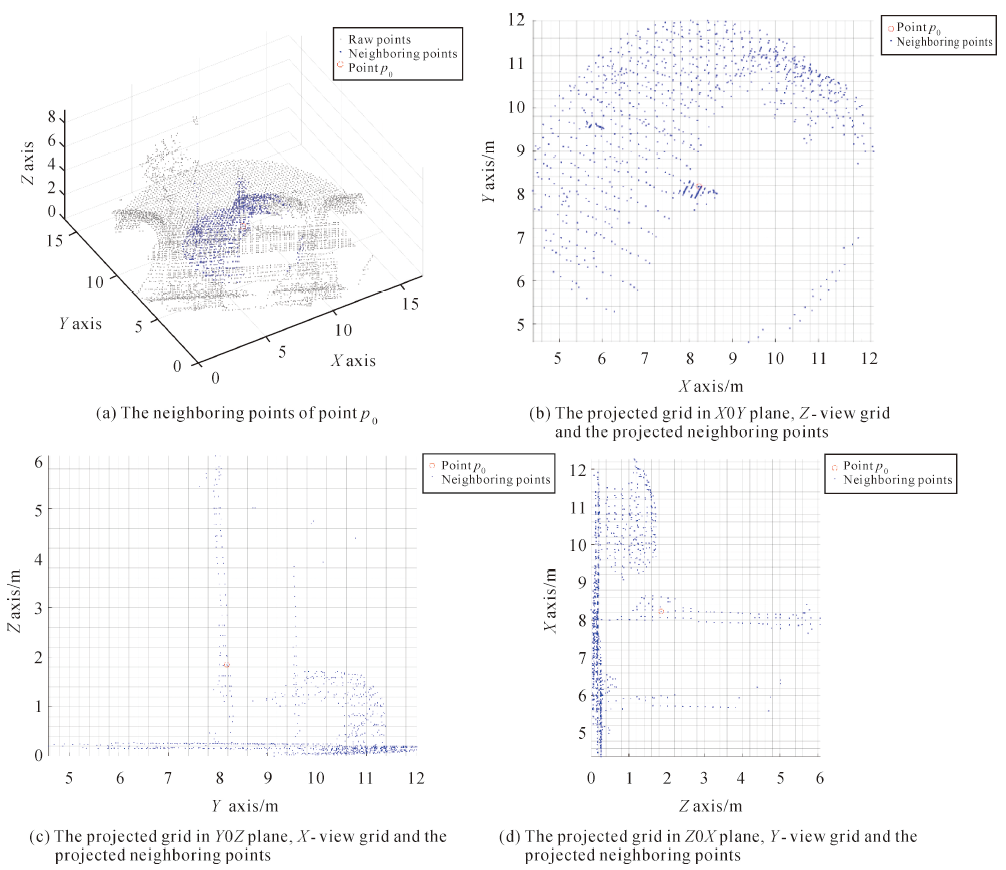

Fig.4
The generated contextual images for one scale of point p0(Composed by the grayscale image (a), (b), and (c))"
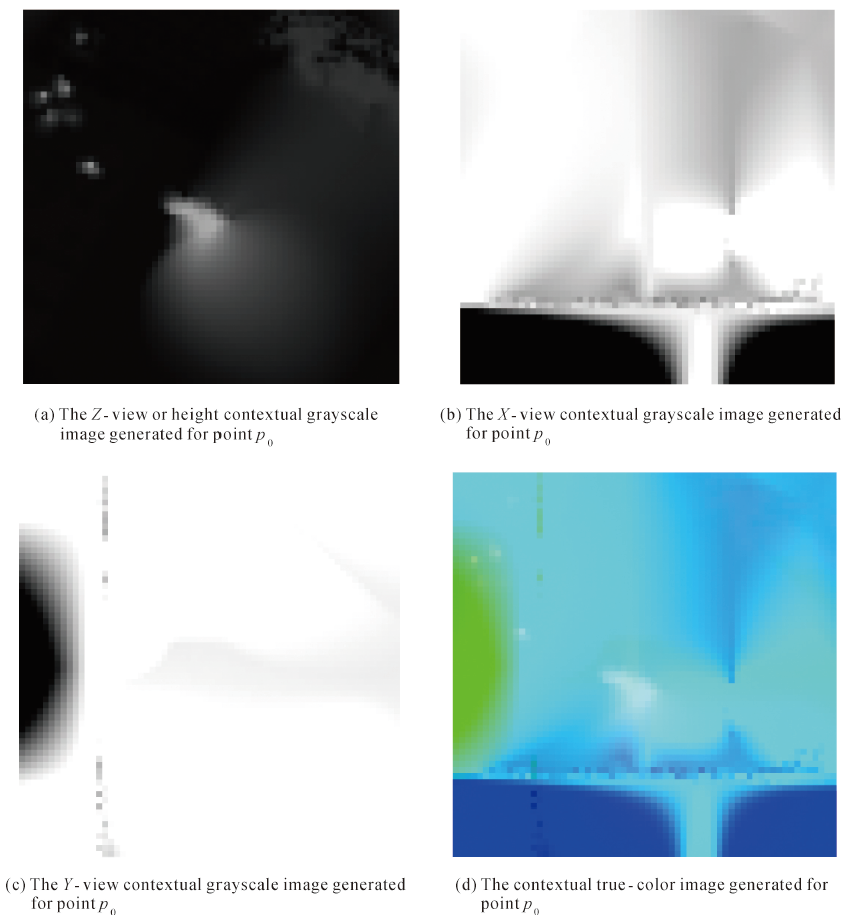

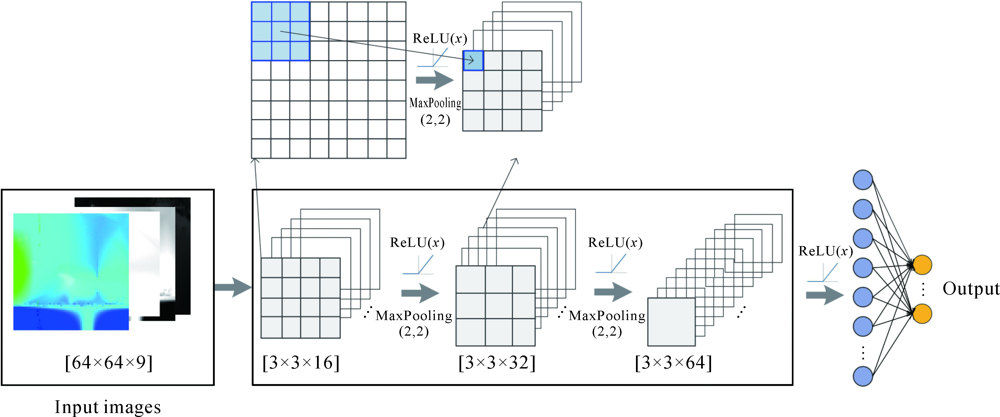
Fig.5
The designed simple convolutional neural network architecture, including the overview framework, detailed layers and parameters setting for this simple multi-scale CNN"
Tab.2
The precision/recall rates of the method of Xiang et al.[22] and our method for three test datasets(%)"
| Set | Method | Ground | Building | Car | Tree | Curb | Utility pole | Others |
|---|---|---|---|---|---|---|---|---|
| S1 | Xiang et al.’s[ | 90.4/97.5 | 79.7/99.2 | 75.1/52.1 | 97.2/85.1 | 72.2/78.8 | 83.6/35.0 | 80.4/54.8 |
| Our method | 99.8/98.1 | 97.9/87.5 | 94.1/95.0 | 98.8/93.4 | 94.6/94.9 | 90.9/98.7 | 92.5/95.9 | |
| S2 | Xiang et al.’s[ | 98.4/99.4 | 88.6/85.3 | 96.2/61.1 | 99.2/97.1 | 94.1/84.3 | 96.7/85.8 | 85.8/91.0 |
| Our method | 99.2/97.8 | 99.3/75.3 | 97.6/96.9 | 91.2/81.3 | 83.8/96.8 | 88.4/96.8 | 96.9/94.9 | |
| S3 | Xiang et al.’s[ | 94.8/99.6 | 86.8/100 | 84.0/74.2 | 99.2/93.4 | 88.9/97.3 | 97.8/87.4 | 98.1/83.8 |
| Our method | 98.1/88.2 | 95.4/77.3 | 96.5/96.9 | 94.9/86.6 | 94.6/95.9 | 85.7/97.7 | 94.7/96.8 |
Tab.3
The precision/recall rates of our method and ResNet for three test datasets(%)"
| Set | Method | Ground | Building | Car | Tree | Curb | Fence | Street light | Utility pole | Electrical wire |
|---|---|---|---|---|---|---|---|---|---|---|
| S1 | Our method | 99.8/98.1 | 97.9/87.5 | 94.1/95.0 | 98.8/93.4 | 94.6/94.9 | 93.4/98.1 | 86.2/94.4 | 90.9/98.7 | 91.1/93.3 |
| ResNet | 96.1/94.0 | 93.7/87.5 | 91.4/94.4 | 96.6/93.3 | 90.4/93.1 | 89.2/97.4 | 83.6/91.2 | 87.5/96.5 | 87.4/91.8 | |
| S2 | Our method | 99.2/97.8 | 99.3/75.3 | 97.6/96.9 | 91.2/81.3 | 83.8/96.8 | 97.6/94.9 | 76.6/97.7 | 88.4/96.8 | 75.1/95.8 |
| ResNet | 97.4/93.5 | 94.3/74.5 | 96.2/98.3 | 89.9/80.1 | 80.5/95.8 | 95.5/92.5 | 76.2/95.6 | 85.2/91.4 | 64.6/89.1 | |
| S3 | Our method | 98.1/88.2 | 95.4/77.3 | 96.5/96.9 | 94.9/86.6 | 94.6/95.9 | 95.5/95.9 | 83.2/97.4 | 85.7/97.7 | 91.0/96.7 |
| ResNet | 95.3/87.3 | 91.4/76.9 | 93.5/96.2 | 90.8/85.9 | 84.7/94.4 | 93.6/90.3 | 75.8/95.1 | 82.9/93.2 | 86.4/90.5 |
Tab.4
The processing time of our method and ResNet for three test datasets"
| Set | Our method | ResNet | ||
|---|---|---|---|---|
| T1 | T2 | T1 | T2 | |
| S1 | 218min 24s | 15s | 397min 42s | 16s |
| S2 | 18s | 17s | ||
| S3 | 10s | 12s | ||
| [1] |
PINGEL T J, CLARKE K C, MCBRIDE W A. An improved simple morphological filter for the terrain classification of airborne LIDAR data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013,77:21-30.
doi: 10.1016/j.isprsjprs.2012.12.002 |
| [2] |
WANG Heng, WANG Bin, LIU Bingbing, et al. Pedestrian recognition and tracking using 3D LiDAR for autonomous vehicle[J]. Robotics and Autonomous Systems, 2017,88:71-78.
doi: 10.1016/j.robot.2016.11.014 |
| [3] |
GÉZERO L, ANTUNES C. Road rutting measurement using mobile LiDAR systems point cloud[J]. ISPRS International Journal of Geo-Information, 2019,8(9):404.
doi: 10.3390/ijgi8090404 |
| [4] |
YAN Li, LIU Hua, TAN Junxiang, et al. A multi-constraint combined method for ground surface point filtering from mobile LiDAR point clouds[J]. Remote Sensing, 2017,9(9):958.
doi: 10.3390/rs9090958 |
| [5] |
YADAV M, SINGH A K. Rural road surface extraction using mobile LiDAR point cloud data[J]. Journal of the Indian Society of Remote Sensing, 2018,46(4):531-538.
doi: 10.1007/s12524-017-0732-4 |
| [6] |
XIA Shaobo, WANG Ruisheng. Extraction of residential building instances in suburban areas from mobile LiDAR data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2018,144:453-468.
doi: 10.1016/j.isprsjprs.2018.08.009 |
| [7] |
GARGOUM S A, KARSTEN L, EL-BASYOUNY K, et al. Automated assessment of vertical clearance on highways scanned using mobile LiDAR technology[J]. Automation in Construction, 2018,95:260-274.
doi: 10.1016/j.autcon.2018.08.015 |
| [8] |
DÍAZ-VILARIÑO L, GONZÁLEZ-JORGE H, BUENO M, et al. Automatic classification of urban pavements using mobile LiDAR data and roughness descriptors[J]. Construction and Building Materials, 2016,102:208-215.
doi: 10.1016/j.conbuildmat.2015.10.199 |
| [9] |
GARGOUM S A, El-BASYOUNY K, FROESE K, et al. A fully automated approach to extract and assess road cross sections from mobile lidar data[J]. IEEE Transactions on Intelligent Transportation Systems, 2018,19(11):3507-3516.
doi: 10.1109/TITS.2017.2784623 |
| [10] |
DU Jianli, CHEN Dong, WANG Ruisheng, et al. A novel framework for 2.5-D building contouring from large-scale residential scenes[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019,57(6):4121-4145.
doi: 10.1109/TGRS.36 |
| [11] |
DONG Zhen, LIANG Fuxun, YANG Bisheng, et al. Registration of large-scale terrestrial laser scanner point clouds: a review and benchmark[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020,163:327-342.
doi: 10.1016/j.isprsjprs.2020.03.013 |
| [12] |
YANG Bisheng, LIU Yuan, DONG Zhen, et al. 3D local feature BKD to extract road information from mobile laser scanning point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017,130:329-343.
doi: 10.1016/j.isprsjprs.2017.06.007 |
| [13] |
HUANG Bo, ZHAO Bei, SONG Yimeng. Urban land-use mapping using a deep convolutional neural network with high spatial resolution multispectral remote sensing imagery[J]. Remote Sensing of Environment, 2018,214:73-86.
doi: 10.1016/j.rse.2018.04.050 |
| [14] |
PAOLETTI M E, HAUT J M, PLAZA J, et al. A new deep convolutional neural network for fast hyperspectral image classification[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2018,145:120-147.
doi: 10.1016/j.isprsjprs.2017.11.021 |
| [15] |
MARCOS D, VOLPI M, KELLENBERGER B, et al. Land cover mapping at very high resolution with rotation equivariant CNNs: towards small yet accurate models[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2018,145:96-107.
doi: 10.1016/j.isprsjprs.2018.01.021 |
| [16] |
LIU Tao, ABD-ELRAHMAN A. Deep convolutional neural network training enrichment using multi-view object-based analysis of Unmanned Aerial systems imagery for wetlands classification[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2018,139:154-170.
doi: 10.1016/j.isprsjprs.2018.03.006 |
| [17] |
ZHAO Wenzhi, DU Shihong. Learning multiscale and deep representations for classifying remotely sensed imagery[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2016,113:155-165.
doi: 10.1016/j.isprsjprs.2016.01.004 |
| [18] | HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al. Deep residual learning for image recognition[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas: IEEE, 2016: 770-778. |
| [19] |
RIZALDY A, PERSELLO C, GEVAERT C, et al. Ground and multi-class classification of airborne laser scanner point clouds using fully convolutional networks[J]. Remote Sensing, 2018,10(11):1723.
doi: 10.3390/rs10111723 |
| [20] |
HU Xiangyun, YUAN Yi. Deep-learning-based classification for DTM extraction from ALS point cloud[J]. Remote Sensing, 2016,8(9):730.
doi: 10.3390/rs8090730 |
| [21] |
ZHANG Liqiang, ZHANG Liang. Deep learning-based classification and reconstruction of residential scenes from large-scale point clouds[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018,56(4):1887-1897.
doi: 10.1109/TGRS.2017.2769120 |
| [22] |
XIANG Binbin, YAO Jian, LU Xiaohu, et al. Segmentation-based classification for 3D point clouds in the road environment[J]. International Journal of Remote Sensing, 2018,39(19):6182-6212.
doi: 10.1080/01431161.2018.1455235 |
| [23] |
WEN Chenglu, SUN Xiaotian, LI J, et al. A deep learning framework for road marking extraction, classification and completion from mobile laser scanning point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019,147:178-192.
doi: 10.1016/j.isprsjprs.2018.10.007 |
| [24] |
QIN Nannan, HU Xiangyun, WANG Puzuo, et al. Semantic labeling of ALS point cloud via learning voxel and pixel representations[J]. IEEE Geoscience and Remote Sensing Letters, 2020,17(5):859-863.
doi: 10.1109/LGRS.8859 |
| [25] |
ZHANG Yongjun, XIONG Xiaodong, WANG Mengqiu, et al. A fast aerial image matching method using airborne LiDAR point cloud and POS data[J]. Journal of Geodesy and Geoinformation Science, 2019,2(1):26-36. DOI: 10.11947/j.JGGS.2019.0104.
doi: 10.11947/j.JGGS.2019.0104 |
| [26] |
POUX F, BILLEN R. Voxel-based 3D point cloud semantic segmentation: unsupervised geometric and relationship featuring vs deep learning methods[J]. ISPRS International Journal of Geo-Information, 2019,8(5):213.
doi: 10.3390/ijgi8050213 |
| [27] | CHARLES R Q, SU Hao, MO Kaichun, et al. Pointnet: deep learning on point sets for 3D classification and segmentation[C]// Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Honolulu: IEEE, 2017: 77-85. |
| [28] |
YOUSEFHUSSIEN M, KELBE D J, IENTILUCCI E J, et al. A multi-scale fully convolutional network for semantic labeling of 3D point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2018,143:191-204.
doi: 10.1016/j.isprsjprs.2018.03.018 |
| [29] | QI C R, YI Li, SU Hao, et al. Pointnet++: deep hierarchical feature learning on point sets in a metric space[C]//Proceedings of the 31st International Conference on Neural Information Processing Systems. Long Beach: ACM, 2017: 5105-5114. |
| [30] | WU Zhirong, SONG Shuran, KHOSLA A, et al. 3D shapeNets: a deep representation for volumetric shapes[C]//2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Boston: IEEE, 2015: 1912-1920. |
| [31] |
YU Yongtao, LI J, GUAN Haiyan, et al. Automated detection of three-dimensional cars in mobile laser scanning point clouds using DBM-Hough-Forests[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016,54(7):4130-4142.
doi: 10.1109/TGRS.2016.2537830 |
| [32] |
WANG Lei, HUANG Yuchun, SHAN Jie, et al. MSNet: multi-scale convolutional network for point cloud classification[J]. Remote Sensing, 2018,10(4):612.
doi: 10.3390/rs10040612 |
| [33] |
BOBKOV D, CHEN Sili, JIAN Ruiqing, et al. Noise-resistant deep learning for object classification in three-dimensional point clouds using a point pair descriptor[J]. IEEE Robotics and Automation Letters, 2018,3(2):865-872.
doi: 10.1109/LSP.2016. |
| [34] |
ZHAO Ruibin, PANG Mingyong, WANG Jidong. Classifying airborne LiDAR point clouds via deep features learned by a multi-scale convolutional neural network[J]. International Journal of Geographical Information Science, 2018,32(5):960-979.
doi: 10.1080/13658816.2018.1431840 |
| [35] |
ZHANG Rui, LI Guangyun, LI Minglei, et al. Fusion of images and point clouds for the semantic segmentation of large-scale 3D scenes based on deep learning[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2018,143:85-96.
doi: 10.1016/j.isprsjprs.2018.04.022 |
| [36] |
VETRIVEL A, GERKE M, KERLE N, et al. Disaster damage detection through synergistic use of deep learning and 3D point cloud features derived from very high resolution oblique aerial images, and multiple-kernel-learning[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2018,140:45-59.
doi: 10.1016/j.isprsjprs.2017.03.001 |
| [37] |
YU Yongtao, LI J, GUAN Haiyan, et al. Learning hierarchical features for automated extraction of road markings from 3-D mobile LiDAR point clouds[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2015,8(2):709-726.
doi: 10.1109/JSTARS.4609443 |
| [38] | MALTEZOS E, DOULAMIS N, DOULAMIS A, et al. Deep convolutional neural networks for building extraction from orthoimages and dense image matching point clouds[J]. Journal of Applied Remote Sensing, 2017,11(4):042620. |
| [39] |
BOULCH A, GUERRY J, LE SAUX B, et al. SnapNet: 3D point cloud semantic labeling with 2D deep segmentation networks[J]. Computers & Graphics, 2018,71:189-198.
doi: 10.1016/j.cag.2017.11.010 |
| [40] |
YANG Zhishuang, JIANG Wanshou, XU Bo, et al. A convolutional neural network-based 3D semantic labeling method for ALS point clouds[J]. Remote Sensing, 2017,9(9):936.
doi: 10.3390/rs9090936 |
| [41] |
RIZALDY A, PERSELLO C, GEVAERT C M, et al. Fully convolutional networks for ground classification from LiDAR point clouds[J]. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2018, IV-2:231-238.
doi: 10.5194/isprs-annals-IV-2-231-2018 |
| [42] |
ZOU Xinhuai, CHENG Ming, WANG Cheng, et al. Tree classification in complex forest point clouds based on deep learning[J]. IEEE Geoscience and Remote Sensing Letters, 2017,14(12):2360-2364.
doi: 10.1109/LGRS.2017.2764938 |
| [43] |
KUMAR B, PANDEY G, LOHANI B, et al. A multi-faceted CNN architecture for automatic classification of mobile LiDAR data and an algorithm to reproduce point cloud samples for enhanced training[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019,147:80-89.
doi: 10.1016/j.isprsjprs.2018.11.006 |
| [44] |
ZHANG Le, SUN Jian, ZHENG Qiang. 3D point cloud recognition based on a multi-view convolutional neural network[J]. Sensors, 2018,18(11):3681.
doi: 10.3390/s18113681 |
| [45] |
WANG Zhen, ZHANG Liqiang, ZHANG Liang, et al. A deep neural network with spatial pooling (DNNSP) for 3-D point cloud classification[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018,56(8):4594-4604.
doi: 10.1109/TGRS.2018.2829625 |
| [46] |
BÖRCS A, NAGY B, BENEDEK C. Instant object detection in lidar point clouds[J]. IEEE Geoscience and Remote Sensing Letters, 2017,14(7):992-996.
doi: 10.1109/LGRS.2017.2674799 |
| [47] | LEDOUX H, GOLD C. An efficient natural neighbour interpolation algorithm for geoscientific modelling[C]//Proceedings of the 11th International Symposium on Spatial Data Handling. Leicester: SDH, 2004: 97-108. |
| [48] |
QI Kunlun, YANG Chao, GUAN Qiangfeng, et al. A multiscale deeply described correlatons-based model for land-use scene classification[J]. Remote Sensing, 2017,9(9):917.
doi: 10.3390/rs9090917 |
| [1] | Kexian WANG,Shunyi ZHENG,Rui LI,Li GUI. A Deep Double-Channel Dense Network for Hyperspectral Image Classification [J]. Journal of Geodesy and Geoinformation Science, 2021, 4(4): 46-62. |
| [2] | Long SUN, Tao WU, Guangcai SUN, Dazheng FENG, Lieshu TONG, Mengdao XING. Object Detection Research of SAR Image Using Improved Faster Region-Based Convolutional Neural Network [J]. Journal of Geodesy and Geoinformation Science, 2020, 3(3): 18-28. |
| [3] | Hao HE,Shuyang WANG,Shicheng WANG,Dongfang YANG,Xing LIU. A Road Extraction Method for Remote Sensing Image Based on Encoder-Decoder Network [J]. Journal of Geodesy and Geoinformation Science, 2020, 3(2): 16-25. |
| [4] | Dazhao FAN,Yang DONG,Yongsheng ZHANG. Satellite Image Matching Method Based on Deep Convolutional Neural Network [J]. Journal of Geodesy and Geoinformation Science, 2019, 2(2): 90-100. |
| [5] | Jianya GONG,Shunping JI. Photogrammetry and Deep Learning [J]. Journal of Geodesy and Geoinformation Science, 2018, 1(1): 1-15. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||