
Journal of Geodesy and Geoinformation Science ›› 2023, Vol. 6 ›› Issue (1): 11-30.doi: 10.11947/j.JGGS.2023.0102
Previous Articles Next Articles
Huasheng SUN1( ),Yuan ZHANG2()
),Yuan ZHANG2()
Received:2022-03-04
Accepted:2022-06-17
Online:2023-03-20
Published:2023-05-04
Contact:
Yuan ZHANG
E-mail:sunhuasheng@126.com;yzhang@geo.ecnu.edu.cn
About author:Huasheng SUN, PhD, associate professor, main research interests include UAV photogrammetry, romete sensing and digital image processing. E-mail: Supported by:Huasheng SUN,Yuan ZHANG. A Self-calibration Bundle Adjustment Algorithm Based on Block Matrix Cholesky Decomposition Technology[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(1): 11-30.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Fig.1
Penalty degree of the three weight functions in this study"

Tab.1
Jacobian matrix, weight and residual of each image point sorted by camera number k, image number j and world point number i"
| Camera serial number k | Total image point number in each group nk | Image serial number j | Total image point number on each image nj | Visible world point serial number i | Index number idx | Jacobian matrix of camera parameters Aij | Jacobian matrix of world points Bij | Weight matrix Pij | Residual rij |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 6 | 1 | 3 | 1 | 1 | A11 | B11 | P11 | r11 |
| 2 | 2 | A21 | B21 | P21 | r21 | ||||
| 3 | 3 | A31 | B31 | P31 | r31 | ||||
| 2 | 3 | 1 | 4 | A12 | B12 | P12 | r12 | ||
| 2 | 5 | A22 | B22 | P22 | r22 | ||||
| 4 | 6 | A42 | B42 | P42 | r42 | ||||
| 2 | 6 | 3 | 3 | 3 | 7 | A33 | B33 | P33 | r33 |
| 4 | 8 | A43 | B43 | P43 | r43 | ||||
| 5 | 9 | A53 | B53 | P53 | r53 | ||||
| 4 | 3 | 2 | 10 | A24 | B24 | P24 | r24 | ||
| 4 | 11 | A44 | B44 | P44 | r44 | ||||
| 5 | 12 | A54 | B54 | P54 | r54 |
Tab.2
Jacobian matrix, weight and residual of each image point sorted by camera number k, world point number i and image number j"
| Camera serial number k | Visible world point serial number i | Frequency of world point i on the images captured by camera knk(i) | Image serial number j | Index number idx | Jacobian matrix of camera parameters Aij | Jacobian matrix of world points Bij | Weight matrix Pij | Residual rij |
|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 2 | 1 | 1 | A11 | B11 | P11 | r11 |
| 2 | 4 | A12 | B12 | P12 | r12 | |||
| 2 | 2 | 1 | 2 | A21 | B21 | P21 | r21 | |
| 2 | 5 | A22 | B22 | P22 | r22 | |||
| 3 | 1 | 1 | 3 | A31 | B31 | P31 | r31 | |
| 4 | 1 | 2 | 6 | A42 | B42 | P42 | r42 | |
| 2 | 2 | 1 | 4 | 10 | A24 | B24 | P24 | r24 |
| 3 | 1 | 3 | 7 | A33 | B33 | P33 | r33 | |
| 4 | 2 | 3 | 8 | A43 | B43 | P43 | r43 | |
| 4 | 11 | A44 | B44 | P44 | r44 | |||
| 5 | 2 | 3 | 9 | A53 | B53 | P53 | r53 | |
| 4 | 12 | A54 | B54 | P54 | r54 |
Tab.3
Jacobian matrix, weight and residual of each image point sorted by world point number i, image number j and camera number k"
| Visible world point serial number i | Frequency of world point i on all images ni | Image serial number j | Camera serial number k | Index number idx | Jacobian matrix of camera parameters Aij | Jacobian matrix of world points Bij | Weight matrix Pij | Residual rij |
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 1 | 1 | 1 | A11 | B11 | P11 | r11 |
| 2 | 1 | 4 | A12 | B12 | P12 | r12 | ||
| 2 | 3 | 1 | 1 | 2 | A21 | B21 | P21 | r21 |
| 2 | 1 | 5 | A22 | B22 | P22 | r22 | ||
| 4 | 2 | 10 | A24 | B24 | P24 | r24 | ||
| 3 | 2 | 1 | 1 | 3 | A31 | B31 | P31 | r31 |
| 3 | 2 | 7 | A33 | B33 | P33 | r33 | ||
| 4 | 3 | 2 | 1 | 6 | A42 | B42 | P42 | r42 |
| 3 | 2 | 8 | A43 | B43 | P43 | r43 | ||
| 4 | 2 | 11 | A44 | B44 | P44 | r44 | ||
| 5 | 2 | 3 | 2 | 9 | A53 | B53 | P53 | r53 |
| 4 | 2 | 12 | A54 | B54 | P54 | r54 |

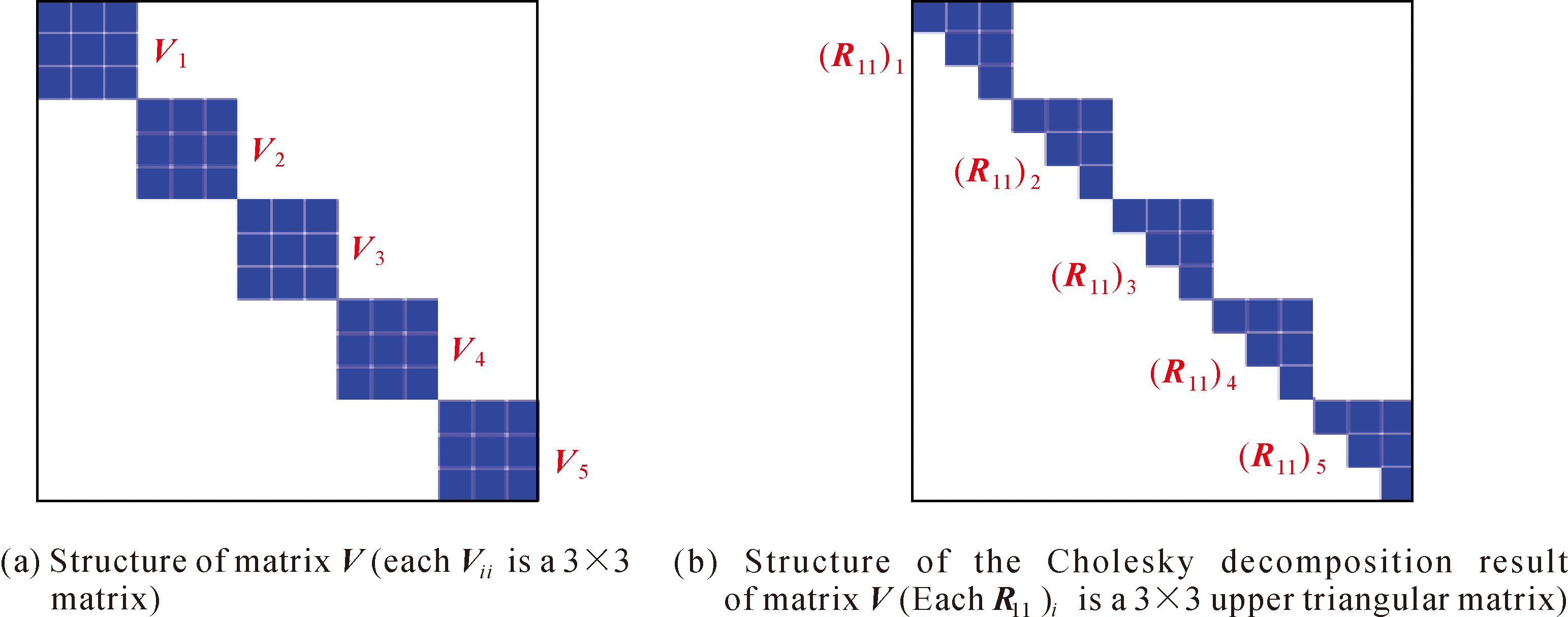
Fig.2
Structure of matrix V and its Cholesky decomposition result"
Tab.4
Simulated camera parameters in this study"
| k | j | fx | fy | xp | yp | s | k1 | k2 | p1 | p2 | Xs | Ys | Zs | ω/(°) | φ/(°) | κ/(°) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 2400 | 2400 | 1015 | 1025 | 0 | 2e-8 | 3e-14 | 5e-6 | 4e-6 | -80 | -80 | -505 | -15 | 13 | 2 |
| 2 | 2400 | 2400 | 1015 | 1025 | 0 | 2e-8 | 3e-14 | 5e-6 | 4e-6 | 5 | -80 | -505 | -12 | 2 | 1 | |
| 3 | 2400 | 2400 | 1015 | 1025 | 0 | 2e-8 | 3e-14 | 5e-6 | 4e-6 | 80 | -80 | -505 | -15 | -14 | 3 | |
| 2 | 4 | 2450 | 2450 | 1010 | 1015 | 0 | 3e-8 | 4e-14 | 3e-6 | 5e-6 | -80 | 0 | -500 | 1 | 15 | 2 |
| 5 | 2450 | 2450 | 1010 | 1015 | 0 | 3e-8 | 4e-14 | 3e-6 | 5e-6 | 5 | 0 | -500 | 2 | 1 | 3 | |
| 6 | 2450 | 2450 | 1010 | 1015 | 0 | 3e-8 | 4e-14 | 3e-6 | 5e-6 | 80 | 0 | -500 | 0 | -16 | 3 | |
| 3 | 7 | 2500 | 2500 | 1020 | 1030 | 0 | 1e-8 | 2e-14 | 2e-6 | 4e-6 | -80 | 80 | -510 | 16 | 15 | 2 |
| 8 | 2500 | 2500 | 1020 | 1030 | 0 | 1e-8 | 2e-14 | 2e-6 | 4e-6 | 5 | 80 | -510 | 15 | 1 | 0 | |
| 9 | 2500 | 2500 | 1020 | 1030 | 0 | 1e-8 | 2e-14 | 2e-6 | 4e-6 | 80 | 80 | -510 | 14 | -15 | 1 |

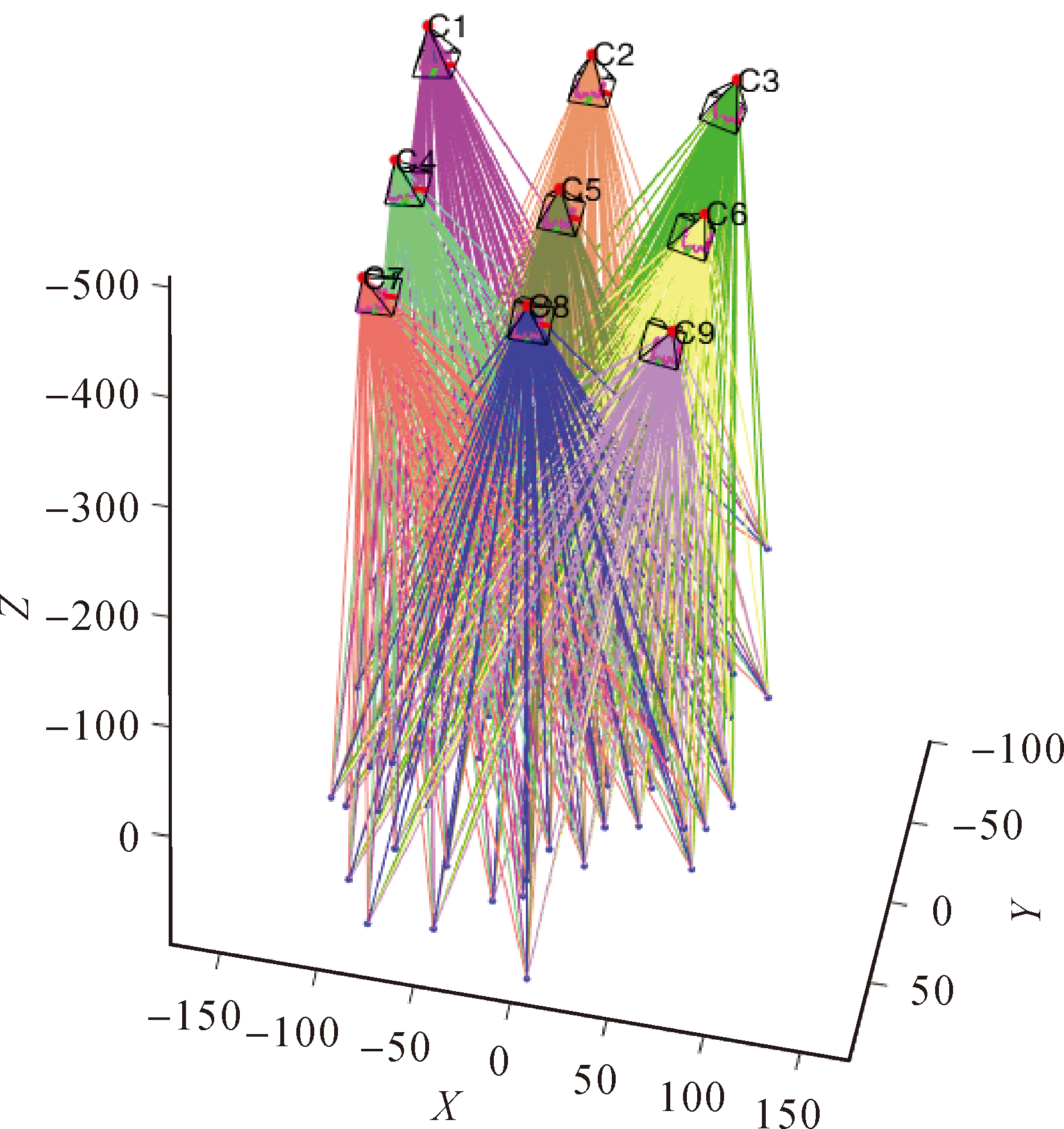
Fig.3
Simulated camera pose of each image and scene structure in this study"
Tab.5
A set of initial values and the optimized results"
| Data | k | j | fx | fy | xp | yp | s | k1 | k2 | p1 | p2 | Xs | Ys | Zs | ω /(°) | φ /(°) | κ /(°) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Initial values | 1 | 1 | 3000 | 3000 | 1000 | 1000 | 0 | 0 | 0 | 0 | 0 | -73.71 | -70.70 | -499.16 | -16.08 | 14.95 | 1.90 |
| 2 | 3000 | 3000 | 1000 | 1000 | 0 | 0 | 0 | 0 | 0 | 13.12 | -86.85 | -495.81 | -10.45 | 0.17 | 0.46 | ||
| 3 | 3000 | 3000 | 1000 | 1000 | 0 | 0 | 0 | 0 | 0 | 72.54 | -70.59 | -501.89 | -18.29 | -9.50 | 4.46 | ||
| 2 | 4 | 3000 | 3000 | 1000 | 1000 | 0 | 0 | 0 | 0 | 0 | -71.73 | 9.14 | -509.29 | 3.06 | 10.34 | 4.09 | |
| 5 | 3000 | 3000 | 1000 | 1000 | 0 | 0 | 0 | 0 | 0 | 7.65 | -0.29 | -493.02 | -2.68 | 0.39 | 5.55 | ||
| 6 | 3000 | 3000 | 1000 | 1000 | 0 | 0 | 0 | 0 | 0 | 71.95 | 6.01 | -491.32 | -2.23 | -17.18 | 0.76 | ||
| 3 | 7 | 3000 | 3000 | 1000 | 1000 | 0 | 0 | 0 | 0 | 0 | -84.43 | 72.84 | -506.43 | 11.46 | 17.66 | 3.80 | |
| 8 | 3000 | 3000 | 1000 | 1000 | 0 | 0 | 0 | 0 | 0 | 5.94 | 78.44 | -504.85 | 10.97 | 3.95 | 1.55 | ||
| 9 | 3000 | 3000 | 1000 | 1000 | 0 | 0 | 0 | 0 | 0 | 89.15 | 88.31 | -505.14 | 17.23 | -18.13 | -2.37 | ||
| Optimized result | 1 | 1 | 2400 | 2400 | 1015 | 1025 | 0 | 2e-8 | 3e-14 | 5e-6 | 4e-6 | -64.54 | -63.90 | -505.61 | -16.53 | 13.11 | 2.08 |
| 2 | 2400 | 2400 | 1015 | 1025 | 0 | 2e-8 | 3e-14 | 5e-6 | 4e-6 | 7.54 | -63.84 | -505.78 | -13.51 | 2.12 | 1.07 | ||
| 3 | 2400 | 2400 | 1015 | 1025 | 0 | 2e-8 | 3e-14 | 5e-6 | 4e-6 | 71.14 | -63.80 | -505.92 | -16.49 | -13.89 | 3.08 | ||
| 2 | 4 | 2450 | 2450 | 1010 | 1015 | 0 | 3e-8 | 4e-14 | 3e-6 | 5e-6 | -64.59 | 4.03 | -503.16 | -0.52 | 15.13 | 2.05 | |
| 5 | 2450 | 2450 | 1010 | 1015 | 0 | 3e-8 | 4e-14 | 3e-6 | 5e-6 | 7.49 | 4.09 | -503.32 | 0.49 | 1.13 | 3.04 | ||
| 6 | 2450 | 2450 | 1010 | 1015 | 0 | 3e-8 | 4e-14 | 3e-6 | 5e-6 | 71.09 | 4.14 | -503.47 | -1.50 | -15.87 | 3.05 | ||
| 3 | 7 | 2500 | 2500 | 1020 | 1030 | 0 | 1e-8 | 2e-14 | 2e-6 | 4e-6 | -64.66 | 71.63 | -513.42 | 14.49 | 15.14 | 2.01 | |
| 8 | 2500 | 2500 | 1020 | 1030 | 0 | 1e-8 | 2e-14 | 2e-6 | 4e-6 | 7.42 | 71.68 | -513.59 | 13.49 | 1.14 | 0.01 | ||
| 9 | 2500 | 2500 | 1020 | 1030 | 0 | 1e-8 | 2e-14 | 2e-6 | 4e-6 | 71.02 | 71.73 | -513.73 | 12.49 | -14.86 | 1.01 |
Tab.6
Calculated absolute orientation parameters"
| λ | Tx | Ty | Tz | Ω/(°) | Φ/(°) | Κ/(°) |
|---|---|---|---|---|---|---|
| 1.1792 | -5.1990 | -20.4430 | 93.1696 | -1.5093 | 0.1302 | 0.0462 |
Tab.7
Errors between the absolute orientated result and the simulated truth"
| Image | eω/(°) | eφ/(°) | eκ/(°) | |||
|---|---|---|---|---|---|---|
| 1 | -6.3e-6 | 2.7e-6 | -2.9e-5 | 1.2e-5 | 2.0e-7 | -2.2e-6 |
| 2 | -1.1e-6 | 1.7e-6 | -3.2e-5 | 1.1e-5 | 5.5e-8 | -9.3e-8 |
| 3 | 3.9e-6 | 1.9e-6 | -2.9e-5 | 1.2e-5 | 7.8e-7 | 2.4e-6 |
| 4 | -5.8e-6 | 6.6e-6 | -2.3e-5 | 1.1e-5 | -9.5e-7 | -2.4e-6 |
| 5 | -1.5e-6 | 6.6e-6 | -2.5e-5 | 1.1e-5 | -6.0e-7 | -4.1e-9 |
| 6 | 2.4e-6 | 5.9e-6 | -2.4e-5 | 1.1e-5 | -2.7e-7 | 2.5e-6 |
| 7 | -5.0e-6 | 8.7e-6 | -1.9e-5 | 1.8e-5 | -7.3e-7 | -3.7e-6 |
| 8 | -2.0e-6 | 8.4e-6 | -1.8e-5 | 1.8e-5 | -1.2e-6 | 1.7e-8 |
| 9 | 4.8e-7 | 7.9e-6 | -1.7e-5 | 1.8e-5 | -7.4e-7 | 3.9e-6 |
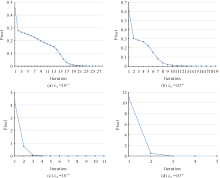
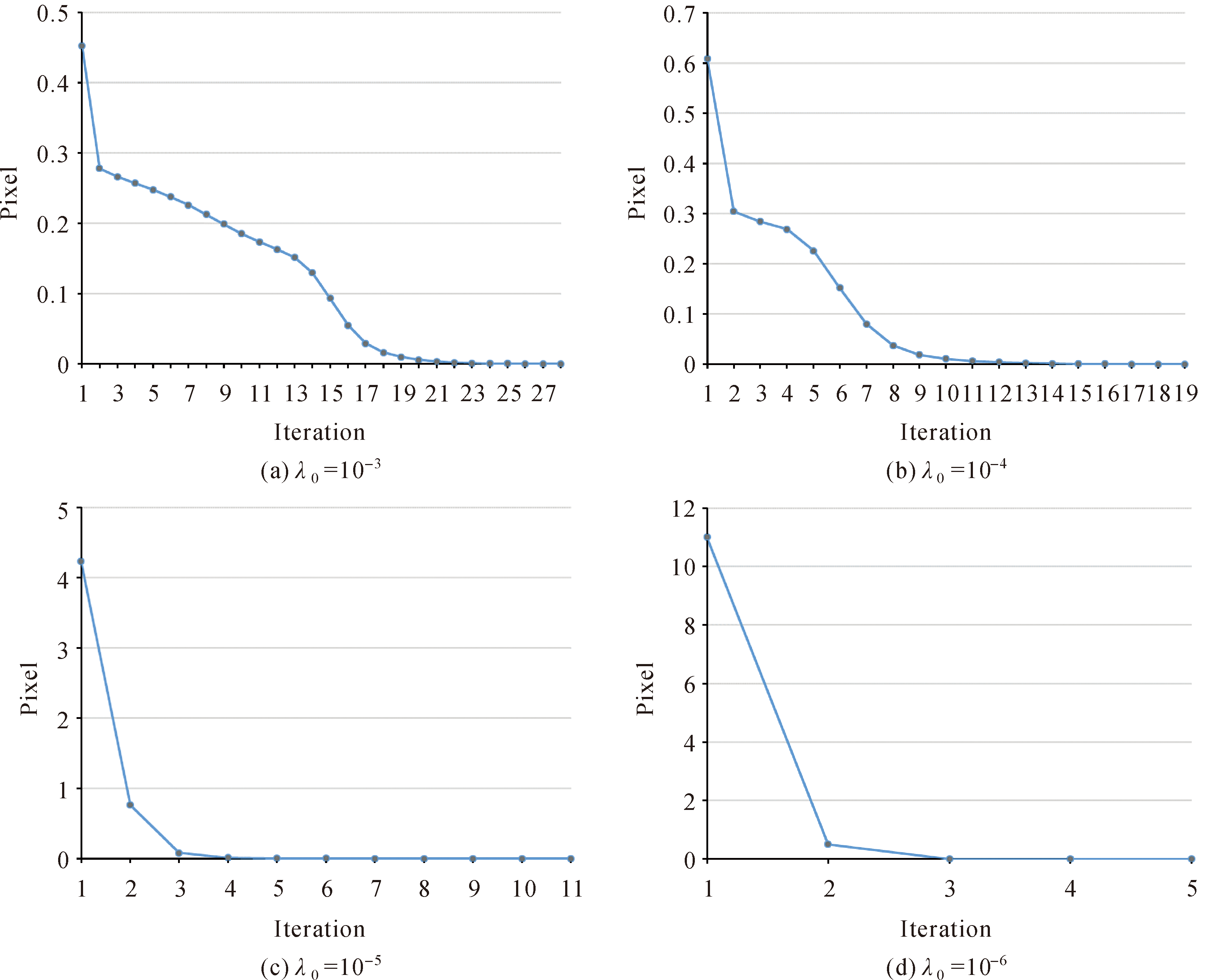
Fig.4
Relationship between the initial value of damping factor λ0 and the convergence speed in the simulation tests"
Tab.8
Average iterations under different initial values of the principal distance"
| f0/pixel | 2500 | 3000 | 4000 | 5000 | 6000 | 8000 | 10000 |
|---|---|---|---|---|---|---|---|
| Iteration | 17.86 | 17.93 | 19.53 | 36.40 | 54.32 | 76.99 | 96.18 |

Fig.5
Feima Robotics D2000 drone (left), and the onboard D-OP3000 five-camera oblique imaging system (right)"

Tab.9
The optimized camera internal parameters"
| Source | Image | fx | fy | xp | yp | s | k1 | k2 | p1 | p2 |
|---|---|---|---|---|---|---|---|---|---|---|
| The proposed algorithm | 1 | 9104.24 | 9104.24 | 3073.35 | 1976.88 | 0 | -1.04e-10 | -7.73e-18 | 5.20e-8 | 7.45e-8 |
| 2 | 9108.08 | 9108.08 | 3062.47 | 2010.15 | 0 | -1.00e-10 | -6.59e-18 | 3.01e-8 | 1.90e-8 | |
| 3 | 9085.39 | 9085.39 | 3083.56 | 2027.70 | 0 | -9.26e-11 | -6.92e-18 | 1.80e-8 | -3.21e-8 | |
| 4 | 9096.24 | 9096.24 | 3040.97 | 2030.13 | 0 | -7.02e-11 | -8.52e-18 | 6.93e-8 | 5.71e-8 | |
| 5 | 6392.76 | 6392.76 | 3008.89 | 1957.21 | 0 | -9.50e-10 | 3.21e-17 | 6.38e-8 | -2.54e-8 | |
| Metashape | 1 | 9106.75 | 9106.75 | 3073.55 | 1974.85 | 0 | -1.01e-10 | -7.65e-18 | 5.47e-8 | 6.57e-8 |
| 2 | 9111.22 | 9111.22 | 3065.30 | 2008.95 | 0 | -1.10e-10 | -5.49e-18 | 3.89e-8 | 1.51e-8 | |
| 3 | 9087.80 | 9087.80 | 3089.71 | 2022.67 | 0 | -8.78e-11 | -7.14e-18 | 3.98e-8 | -4.64e-8 | |
| 4 | 9100.21 | 9100.21 | 3039.43 | 2022.72 | 0 | -6.99e-11 | -8.98e-18 | 6.40e-8 | 4.85e-8 | |
| 5 | 6392.41 | 6392.41 | 3008.08 | 1955.66 | 0 | -9.34e-10 | 3.17e-17 | 5.49e-8 | -3.54e-8 |

Fig.6
Average reprojection error after each iteration"


Fig.7
Reprojection errors of the image points on each image at the last iteration (Note: The red dots denote errors in the x-axis, and the blue ones denote errors in the y-axis)"
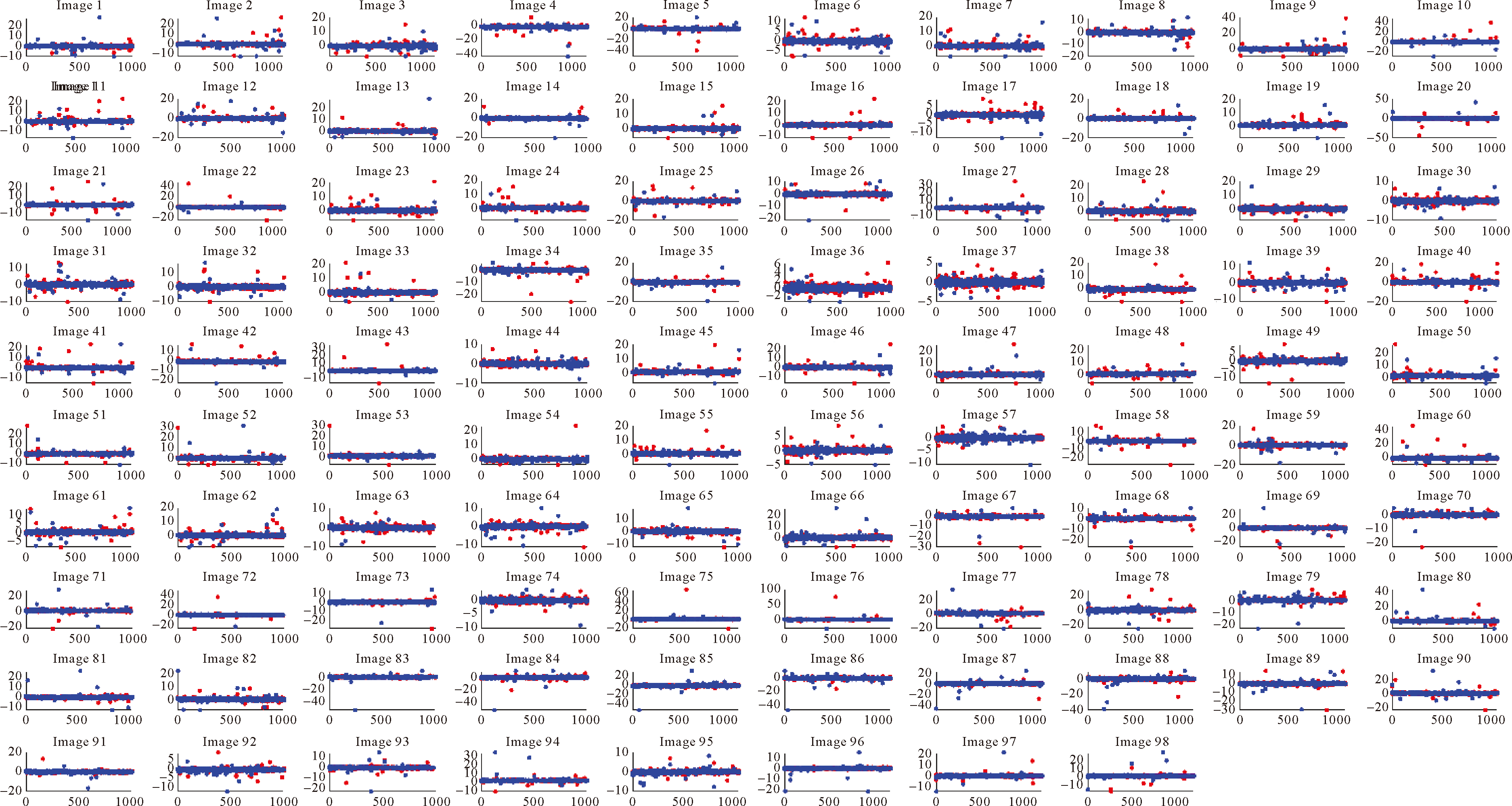

Fig.8
Weights of the image points on each image at the last iteration (Note: The red dots denote weights in the x-axis, and the blue ones denote weights in the y-axis)"
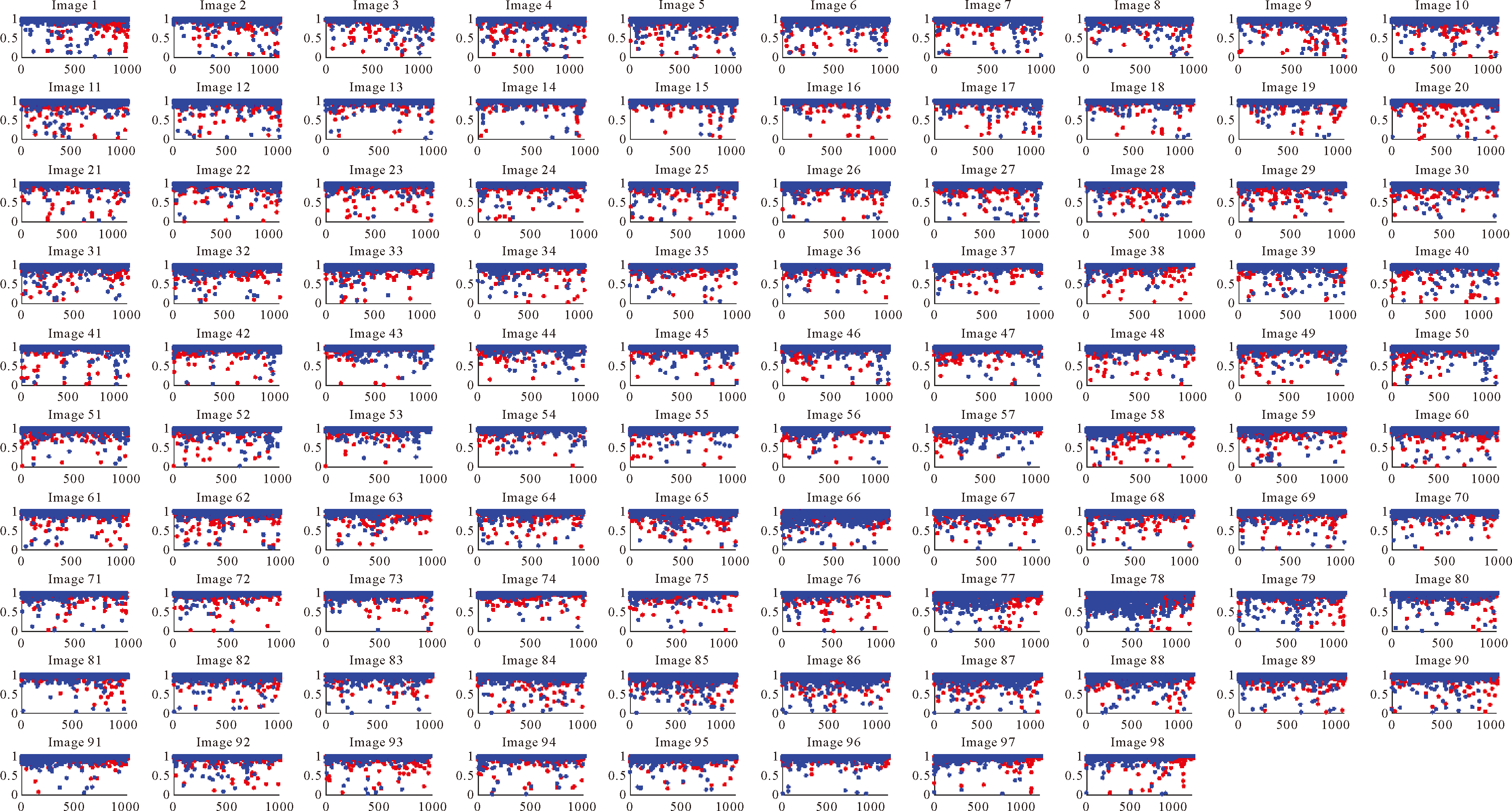

Fig.9
Camera pose of each image and scene structure in the real experiment"

| [1] | BROWN D C. A solution to the general problem of multiple station analytical stereotriangulation[R]. Florida: Patrick Air Force Base, 1958. |
| [2] | WANG Zhizhuo. Principle of photogrammetry[M]. Beijing: Surveying and Mapping Press, 1979. |
| [3] | LI Deren. A posteriori weight estimation in self—calibrating bundle block adjustment[J]. Geomatics and Information Science of Wuhan University, 1982, 7(1): 16-24. |
| [4] | ZHAN Zongqian, ZHANG Zuxun, ZHANG Jianqing. A fast algorithm of bundle adjustment based on sparse matrix technology[J]. Bulletin of Surveying and Mapping, 2006(12): 5-8. |
| [5] | LIU Jun, WANG Donghong, ZHANG Li, et al. GPS/IMU supported bundle adjustment of airborne three line images[J]. Journal of Geomatics Science and Technology, 2009, 26(1): 36-40. |
| [6] | JI Shunping, SHI Yun. Image matching and bundle adjustment using vehicle-based panoramic camera[J]. Acta Geodaetica et Cartographica Sinica, 2013, 42(1): 94-100, 107. |
| [7] | LI Deren, XIAO Xiongwu, GUO Bingxuan, et al. Oblique image based automatic aerotriangulation and its application in 3D city model reconstruction[J]. Geomatics and Information Science of Wuhan University, 2016, 41(6): 711-721. |
| [8] | ZHANG Chunsen, ZHU Shihuan, ZANG Yufu, et al. GPS-supported bundle adjustment method of UAV by considering exposure delay[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(5): 565-572. |
| [9] | LIU Chubin, FAN Dazhao, WU Yongjin, et al. Self-calibration bundle block adjustment for ALOS PRISM imagery[J]. Journal of Geomatics Science and Technology, 2012, 29(3): 196-199, 203. |
| [10] | OU Yu, LEI Rong, JI Song, et al. An orientation image based on self-calibration bundle block adjustment model for ground geometric calibration method[J]. Engineering of Surveying and Mapping, 2012, 21(5): 8-12. |
| [11] | XIA Zemin, LI Zhongwei, ZHONG Kai. Camera calibration optimization with constrained sparse bundle adjustment[J]. Opto-Electronic Engineering, 2015, 42(5): 13-19. |
| [12] | XUE Junpeng, HU Yanfei, WANG Yixuan. Study on the initial value factors of influencing the accuracy of regional network bundle adjustment[J]. Optical Technique, 2019, 45(2): 181-187. |
| [13] | TRIGGS B, MCLAUCHLAN P F, HARTLEY R I, et al. Bundle adjustment—a modern synthesis[C]//Proceedings of International Workshop on Vision Algorithms. Corfu: Springer, 2000: 298-372. |
| [14] | SHAN J. A brief history and essentials of bundle adjustment[J]. Geomatics and Information Science of Wuhan University, 2018, 43(12): 1797-1810. |
| [15] | BYRÖD M, ÅSTRÖM K. Bundle adjustment using conjugate gradients with multiscale preconditioning[C]//Proceedings of British Machine Vision Conference. London: BMVC, 2009. |
| [16] | AGARWAL S, SNAVELY N, SEITZ S M, et al. Bundle adjustment in the large[C]//Proceedings of the 11th European Conference on Computer Vision. Heraklion: Springer, 2010: 29-42. |
| [17] | WU Changchang, AGARWAL S, CURLESS B, et al. Multicore bundle adjustment[C]//Proceedings of CVPR 2011. Colorado Springs: IEEE, 2011: 3057-3064. |
| [18] | LOURAKIS M I A, ARGYROS A A. SBA: a software package for generic sparse bundle adjustment[J]. ACM Transactions on Mathematical Software, 2009, 36(1): 2. |
| [19] |
ZHOU Weijun, CHEN Xiaojun. Global convergence of a new hybrid Gauss-Newton structured BFGS method for nonlinear least squares problems[J]. SIAM Journal on Optimization, 2010, 20(5): 2422-2441.
doi: 10.1137/090748470 |
| [20] |
LI Yanyan, FAN Shiyue, SUN Yanbiao, et al. Bundle adjustment method using sparse BFGS solution[J]. Remote Sensing Letters, 2018, 9(8): 789-798.
doi: 10.1080/2150704X.2018.1480072 |
| [21] |
LIU Xin, GAO Wei, Hu Zhanyi. Hybrid parallel bundle adjustment for 3D scene reconstruction with massive points[J]. Journal of Computer Science and Technology, 2012, 27(6): 1269-1280.
doi: 10.1007/s11390-012-1303-3 |
| [22] |
ZHAO Liang, HUANG Shoudong, SUN Yanbiao, et al. Parallax BA: bundle adjustment using parallax angle feature parametrization[J]. The International Journal of Robotics Research, 2015, 34(4-5): 493-516.
doi: 10.1177/0278364914551583 |
| [23] | ZHENG Maoteng, ZHOU Shunping, ZHU Xiaodong, et al. A new GPU bundle adjustment method for large-scale data[J]. Photogrammetric Engineering & Remote Sensing, 2017, 83(9): 633-641. |
| [24] | ERIKSSON A, BASTIAN J, CHIN T J, et al. A consensus-based framework for distributed bundle adjustment[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 1754-1762. |
| [25] | RAMAMURTHY K N, LIN C C, ARAVKIN A, et al. Distributed bundle adjustment[C]//Proceedings of 2017 IEEE International Conference on Computer Vision Workshops. Venice: IEEE, 2017: 2146-2154. |
| [26] | ZHANG Runze, ZHU Siyu, SHEN Tian, et al. Distributed very large scale bundle adjustment by global camera consensus[C]//Proceedings of 2017 IEEE International Conference on Computer Vision. Venice: IEEE, 2017: 29-38. |
| [27] |
TOUCHETTE S, GUEAIEB W, LANTEIGNE E. Efficient Cholesky factor recovery for column reordering in simultaneous localisation and mapping[J]. Journal of Intelligent and Robotic Systems, 2016, 84: 859-875.
doi: 10.1007/s10846-016-0367-7 |
| [28] | HARTLEY R, ZISSERMAN A. Multiple view geometry in computer vision[M]. 2nd ed. London: Cambridge University Press, 2003. |
| [29] | BROWN D C. Close-range camera calibration[J]. Photogrammetric Engineering, 1971, 37(8): 855-866. |
| [1] | Zongjian LIN,Feifei XIE,Guozhong SU. Accuracy Analysis of Low Altitude Photogrammetry with Wide-angle Camera [J]. Journal of Geodesy and Geoinformation Science, 2018, 1(1): 30-38. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||