
Journal of Geodesy and Geoinformation Science ›› 2019, Vol. 2 ›› Issue (2): 78-89.doi: 10.11947/j.JGGS.2019.0209
Previous Articles Next Articles
Liangpei ZHANG,Yun ZHANG,Zhenzhong CHEN,Peipei XIAO,Bin LUO( )
)
Received:2018-12-01
Accepted:2019-02-10
Online:2019-06-20
Published:2020-03-20
Contact:
Bin LUO
E-mail:luob@whu.edu.cn
About author:Liangpei ZHANG(1962—), male, PhD, professor, majors in the processing, analysis, and application of remote sensing imagery.E-mail: zlp62@whu.edu.cn
Supported by:Liangpei ZHANG,Yun ZHANG,Zhenzhong CHEN,Peipei XIAO,Bin LUO. Splitting and Merging Based Multi-model Fitting for Point Cloud Segmentation[J]. Journal of Geodesy and Geoinformation Science, 2019, 2(2): 78-89.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
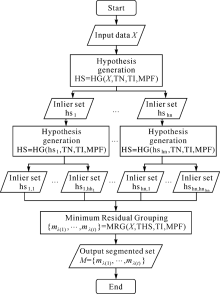
Fig.1
The workflow of the whole algorithm"


Fig.2
Different cut methods"
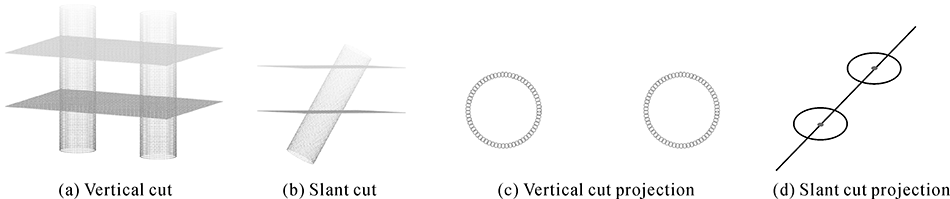

Fig.3
Test data"
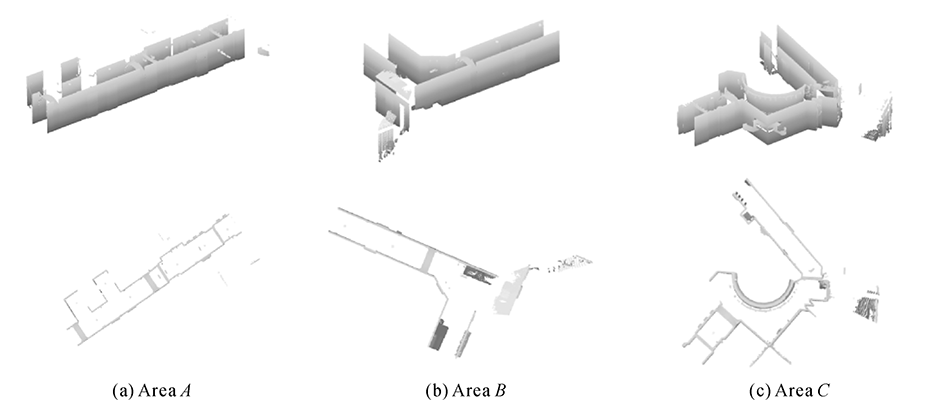

Fig.4
Experimental results on area A"
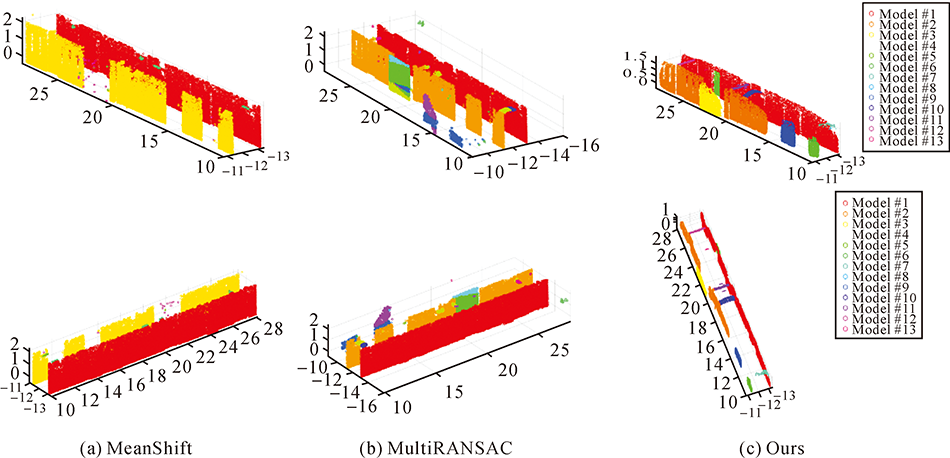

Fig.5
Experimental results on area B"

Tab.1
Time consumptions"
| Method | Area A | Area B |
|---|---|---|
| MeanShift | 554 | 390 |
| MultiRANSAC | 230 | 132 |
| Ours | 70 | 30 |

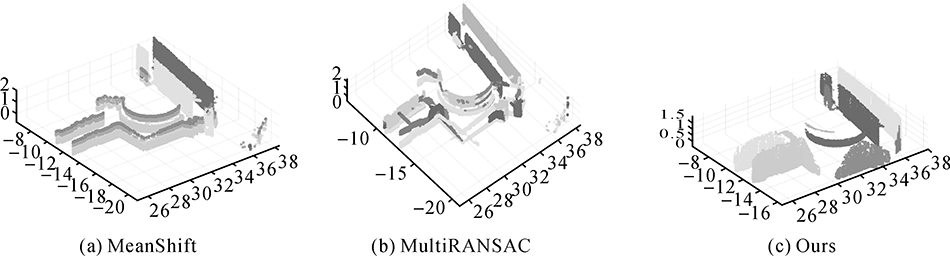
Fig.6
Experimental results on area C"
Tab.2
Segmentation Accuracy%"
| Algorithms | Area A | Area B | Area C |
|---|---|---|---|
| MeanShift | 73.6 | 81.2 | 61.5 |
| MutliRANSAC | 76.8 | 71.4 | 56.2 |
| Ours | 83.2 | 85.7 | 81.3 |
| [1] | LI Deren, YAO Yuan, SHAO Zhenfeng. The Concept , Supporting Technologies and Applications of Smart City[J]. Journal of Engineering Studies, 2012,4(4):313-323. |
| [2] | SCHNABEL R, WAHL R, WESSEL R , et al. Shape Recognition in 3D Point-clouds[C]//The 16-th International Conference in Central Europe on Computer Graphics, Visualization and Computer Vision’2008. Czech Republic: UNION Agency-Science Press, 2008: 65-72. https://www.researchgate.net/publication/228652854_Shape_Recognition_in_3D_Point-Clouds |
| [3] | LI Yangyan, WU Xiaokun, CHRYSATHOU Y , et al. GlobFit: Consistently Fitting Primitives by Discovering Global Relations[C]// Proceeding of ACM SIGGRAPH. Vancouver, British Columbia, Canada: ACM, 2011http://dl.acm.org/citation.cfm?id=1964947 |
| [4] | MAHABADI R K, HANE C, POLLEFEYS M. Segment Based 3D Object Shape Priors[C]// IEEE Computer Vision and Pattern Recognition. Boston, MA: IEEE, 2015: 2838-2846. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=7298901 |
| [5] | GONG Yusong. Research on 3D Modeling of Indoor Objects and Scenes Based on RGBD Data[D]. Nanjing: Nanjing University, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10284-1015321515.htm |
| [6] | DORNINGER P, PFEIFER N . A Comprehensive Automated 3D Approach for Building Extraction, Reconstruction, and Regularization from Airborne Laser Scanning Point Clouds[J]. Sensors, 2008,8(11):7323-7343. DOI: 10.3390/s8117323 |
| [7] | QIN Caijie, GUAN Qiang . Research Status of 3D Point Cloud Data Segmentation[J]. Journal of Yibin University, 2017,17(6):30-35. |
| [8] | BHANU B, LEE S, HO CC , et al. Range Data Processing: Representation of Surfaces by Edges[C]// Proceedings of the Eighth International Conference on Pattern Recognition. Paris, France:[s. n.], 1986: 236-238. https://www.researchgate.net/publication/282828645_RANGE_DATA_PROCESSING_REPRESENTATION_OF_SURFACES_BY_EDGES |
| [9] | JIANG Xiaoyi BUNKE H . Edge Detection in Range Images Based on Scan Line Approximation[J]. Computer Vision and Image Understanding, 1999,73(2):183-199.DOI: 10.1006/cviu.1998.0715 |
| [10] | BESL P J, JAIN R C . Segmentation through Variable-order Surface Fitting[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002,10(2):167-192. |
| [11] | KOSTER K, SPANN M . MIR:An Approach to Robust Clustering-application to Range Image Segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000,22(5):430-444. DOI: 10.1109/34.857001 |
| [12] | ROTTENSTEINER F . Automatic Generation of High-quality Building Models fromLidar Data[J]. IEEE Computer Graphics and Applications IEEE, 2003,23(6):42-50.DOI: 10.1109/MCG.2003.1242381 |
| [13] | TÓVÁRI D, PFEIFER N . Segmentation Based Robust Interpolation-A New Approach to Laser Data Filtering[M] //International Archives ofPhotogrammetry, Remote Sensing and Spatial Information Sciences. Enschede, The Netherlands:[s. n. ], 2005: 12-14. |
| [14] | WANGZhe, LIU Hong, QIAN Yueliang , et al. Real-Time Plane Segmentation and Obstacle Detection of 3D Point Clouds for Indoor Scenes[M] //FUSIELLO A, MURINO V, CUCCHIARA R. Computer Vision-ECCV 2012. Berlin, Heidelberg: Springer, 2012: 22-31. |
| [15] | PAPON J, ABRAMOV A, SCHOELER M , et al. Voxel Cloud Connectivity Segmentation-Supervoxels for Point Clouds[C]// IEEE Computer Vision and Pattern Recognition. Portland, OR: IEEE, 2013: 2027-2034. https://www.computer.org/csdl/proceedings/cvpr/2013/4990/00/4989c027-abs. html |
| [16] | FILIN S . Surface Clustering from Airborne Laser Scanning Data[J]. International Archives of Photogrammetry and Remote Sensing, 2002, XXXⅡ, 3A:119-124. |
| [17] | VOSSELMAN G, DIJKMAN S . 3D Building Model Reconstruction From Point Clouds and Ground Plans[J]. International Archives of Photogrammetry & Remote Sensing, 2001,34(Part 3/W4):37-43. |
| [18] | ZHAN Qingming, YU Liang, LIANG Yubing. A Point Cloud Segmentation Method based on Vector Estimation and Color Clustering[C]// IEEE 2nd International Conference on Information Science and Engineering. Hangzhou, China, China: IEEE, 2011: 3463-3466. http://ieeexplore.ieee.org/document/5691038/ |
| [19] | ZHAN Qingming, YU Liang . Segmentation of LiDAR Point Cloud based on Similarity Measures in Multi-Dimension Euclidean Space[M]//ZENG D. Advances in Computer Science and Engineering. Berlin, Heidelberg: Springer, 2012: 349-357. |
| [20] | HOLZ D, HOLZER S, RUSU R B , et al. Real-Time Plane Segmentation Using RGB-D Cameras[M] //RÖFER T, MAYER N M, SAVAGE J, et al.RoboCup 2011: Robot Soccer World Cup XV. Berlin, Heidelberg: Springer, 2012: 306-317. |
| [21] | SCHOENBERG J R, NATHAN A, CAMPBELL M. Segmentation of Dense Range Information in Complex Urban Scenes[C]// IEEE/RSJ International Conference on Intelligent Robots and Systems. Taipei, Taiwan: IEEE, 2010: 2033-2038. http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=5651749 |
| [22] | SALLEM N K, DEVY M . ExtendedGrabCut for 3D and RGB-D Point Clouds[M] //BLANC-TALON J, KASINSKI A, PHILIPS W, et al. Advanced Concepts for Intelligent Vision Systems. Cham: Springer, 2013: 354-365. |
| [23] | GEETHA M, RAKENDU R. An Improved Method for Segmentation of Point Cloud Using Minimum Spanning Tree[C]// IEEE International Conference on Communications and Signal Processing.Melmaruvathur, India: IEEE, 2014: 833-837. http://ieeexplore.ieee.org/document/6949960/ |
| [24] | YANGJingyu, GAN Ziqiao, LI Kun , et al. Graph-based Segmentation for RGB-D Data Using 3-D Geometry Enhanced Superpixels[J]. IEEE Transactions on Cybernetics, 2017,45(5):927-940. |
| [25] | FISCHLER M A, BOLLES R C . Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography[M] //Readings in Computer Vision.[s. l.]: Elsevier, 1987: 726-740. |
| [26] | TARSHA-KURDI F, LANDES T, GRUSSENMEYER P . Hough-Transform and Extended RANSAC Algorithms for Automatic Detection of 3D Building Roof Planes fromLiDAR Data[C]// Proceedings of the ISPRS Workshop on Laser Scanning, Espoo: ISPRS. 2007, 36: 407-412. https://www.mendeley.com/research-papers/houghtransform-extended-ransac-algorithms-automatic-detection-3d-building-roof-planes-lidar-data/ |
| [27] | SCHNABEL R, WAHL R, KLEIN R . Efficient RANSAC for Point-Cloud Shape Detection[J]. Computer Graphics Forum, 2010,26(2):214-226. |
| [28] | CHEN Dong, ZHANG Liqiang, LI J , et al. Urban Building Roof Segmentation From Airborne Lidar Point Clouds[J]. International Journal of Remote Sensing, 2012,33(20):6497-6515.DOI: 10.1080/01431161.2012.690083 |
| [29] | GELFAND N, GUIBAS L J. Shape Segmentation Using Local Slippage Analysis[C]// Proceedings ofEurographics/ACM SIGGRAPH Symposium on Geometry Processing. Nice, France: ACM, 2004: 214-223. http://dl.acm.org/citation.cfm?id=1057461 |
| [30] | AWADALLAH M, ABBOTT L, GHANNAM S. Segmentation of Sparse Noisy Point Clouds Using Active Contour Models[C]// IEEE International Conference on Image Processing. Paris, France: IEEE, 2015: 6061-6065. http://ieeexplore.ieee.org/document/7026223/ |
| [31] | WANGYanmin, SHI Hongbin . A Segmentation Method for Point Cloud Based on Local Sample and Statistic Inference[M] //BIAN F, XIE Y. Geo-Informatics in Resource Management and Sustainable Ecosystem. Berlin, Heidelberg: Springer, 2015: 274-282. |
| [32] | MATeng, WU Zhuangzhi, FENG Lu , et al. Point Cloud Segmentation Through Spectral Clustering[C]// IEEE 2nd International Conference on Information Science and Engineering. Hangzhou, China: IEEE, 2011: 1-4. http://ieeexplore.ieee.org/document/5690596/ |
| [33] | NURUNNABI A, BELTON D, WEST G. Robust Segmentation in Laser Scanning 3D Point Cloud Data[C]// IEEE International Conference on Digital Image Computing Techniques and Applications. Fremantle, WA, Australia: IEEE, 2013: 1-8. http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=6411672 |
| [34] | WOLF D, PRANKL J, VINCZE M. Fast Semantic Segmentation of 3D Point Clouds Using a Dense CRF with Learned Parameters[C]// IEEE International Conference on Robotics and Automation. Seattle, WA: IEEE, 2015: 4867-4873. http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=7139875 |
| [35] | GREEN W R, GROBLER H. Normal Distribution Transform Graph-based Point Cloud Segmentation[C]// Pattern Recognition Association of South Africa and Robotics andMechatronics International Conference. Port Elizabeth, South Africa: IEEE, 2015: 54-59. http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=7359498 |
| [36] | VINCENT É, LAGANIÈRE R . Detecting PlanarHomographies in an Image Pair[C]// Proceedings of the 2nd International Symposium on Image and Signal Processing and Analysis. Pula, Croatia, Croatia: IEEE, 2001: 182-187. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=938625 |
| [37] | KANAZAWA Y, KAWAKAMI H. Detection of Planar Regions withUncalibrated Stereo Using Distributions of Feature Points[C]// Proceedings of the British Machine Vision Conference.[s. l.]: BMVA Press, 2004: 247-256. https://www.researchgate.net/publication/228961987_Detection_of_Planar_Regions_with_Uncalibrated_Stereo_using_Distributions_of_Feature_Points |
| [38] | ZULIANI M, KENNEY C S, MANJUNATH B S. TheMultiransac Algorithm and Its Application to Detect Planar Homographies[C]// IEEE International Conference on Image Processing. Genova, Italy: IEEE, 2005: Ⅲ-153. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=1530351 |
| [39] | ESTER M, KRIEGEL H P, SANDER J , et al. A Density-based Algorithm for Discovering Clusters in Large Spatial Databases with Noise[C]// Proceedings of 2nd International Conference on Knowledge Discovery and Data Mining.[s. l.]: AAAI Press, 1996: 226-231. http://www.researchgate.net/publication/242504244_A_densitybased_algorithm_for_discovering_clusters_in_large_spatial_databases |
| [40] | COMANICIU D, MEER P . MeanShift:A Robust Approach Toward Feature Space Analysis[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002,24(5):603-619.DOI: 10.1109/34.1000236 |
| [1] | Mi WANG,Zhiqi ZHANG,Zhipeng DONG,Shuying JIN,Hongbo SU. Stream-computing of High Accuracy On-board Real-time Cloud Detection for High Resolution Optical Satellite Imagery [J]. Journal of Geodesy and Geoinformation Science, 2019, 2(2): 50-59. |
| [2] | Lei YAN,Ruihua ZHANG,Yanbiao SUN. A Preliminary Study on the Theory of Polar Coordinates Digital Photogrammetry and the Coordinate System of Spatial Information [J]. Journal of Geodesy and Geoinformation Science, 2018, 1(1): 61-78. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||