
Journal of Geodesy and Geoinformation Science ›› 2020, Vol. 3 ›› Issue (3): 1-17.doi: 10.11947/j.JGGS.2020.0301
Jingnan LIU1, Jiao ZHAN1, Chi GUO1( ), Tingting LEI2, Ying LI3
), Tingting LEI2, Ying LI3
Received:2019-12-12
Accepted:2020-06-12
Online:2020-09-20
Published:2020-09-30
Contact:
GUO Chi
E-mail:guochi@whu.edu.cn
About author:Jingnan LIU (1943—), male, professor, academician of Chinese Academy of Engineering, majors in satellite geodetic theories, methods and data processing, satellite navigation methods, data processing and applications.
Supported by:Jingnan LIU, Jiao ZHAN, Chi GUO, Tingting LEI, Ying LI. Data Logic Structure and Key Technologies on Intelligent High-precision Map[J]. Journal of Geodesy and Geoinformation Science, 2020, 3(3): 1-17.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Tab.1
The map requirements in different levels of autonomous driving"
| Environ- mental monitoring | Level | Name | Definition | Scope | Data content | Map accuracy | Collection method | Map form | Map purpose |
|---|---|---|---|---|---|---|---|---|---|
| Human | L0 | Non- automated | Completely human driving | No | Traditional map | 10m | GPS trajectory+ IMU | Static map | Road navigation |
| L1 | Driver assistance | Single-functional assistance, such as ACC (Adaptive Cruise Control) | Limited | Traditional map | 10m | GPS trajectory+ IMU | Static map | ||
| L2 | Partial automation | Multi-functional assistance, such as LKA (Lane Keeping Assist) | Limited | Traditional map+ADAS data | 1~5m | Active safety | |||
| L3 | Conditional automation | Automated driving under specific environments, human driver intervenes in an emergency | Limited | Static high-precision map | 20~50cm | High-precision POS+image extraction | Static map+dynamic traffic information | ||
| L4 | High automation | Automated driving under specific environments, no human driver intervention | Limited | Dynamic high-precision map | 5~20cm | High-precision POS+laser point cloud | Static map+dynamic traffic and event information and event information | ||
| L5 | Full automation | Fully automated control of the vehicle | Any | Intelligent high-precision map | Multi-source fusion (professi-onal collection+crowdsourcing) | Static map+dynamic traffic and event information+analysis data |

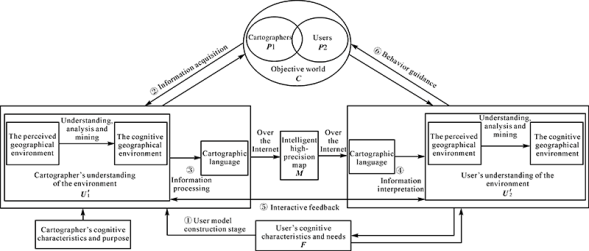
Fig.1
The information transmission model of intelligent high-precision map"
Tab.2
The static map layer diagram of intelligent high-precision map"
| Data type | Content | Attributes | Geometric expression | Service function | Cooperation/ competition |
|---|---|---|---|---|---|
| Road network | Road topology, road geometry | Road direction, curvature, elevation, road type, number of lanes, ramp type, function level, etc. | Road reference line network (lines, points) | Global planning | Cooperation field |
| Lane network | Lane topology, lane geometry | Lane line, lane height, lane radius of curvature, lane width, lane direction, lane limit, etc. | Lane-level road network (lines, points) | Perception, positioning, local planning, vehicle control | |
| Transportation facilities | Traffic signs, roadside facilities, fixed object | Type, height, width, color, shape, shape usage rules, shape classification, ID, etc. | Plane representation (points, lines, areas) Entity representation | ||
| Positioning layer | Multi-type positioning data (such as reflectance map) | Type, area, radius, color, reflectivity, feature height, etc. | Plane representation, entity representation | Positioning | Competitive field |
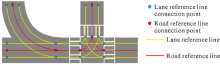
Fig.2
The road and lane network schematic diagram of intelligent high-precision map"
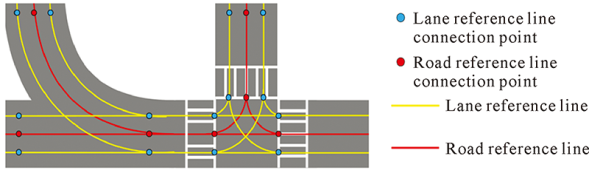

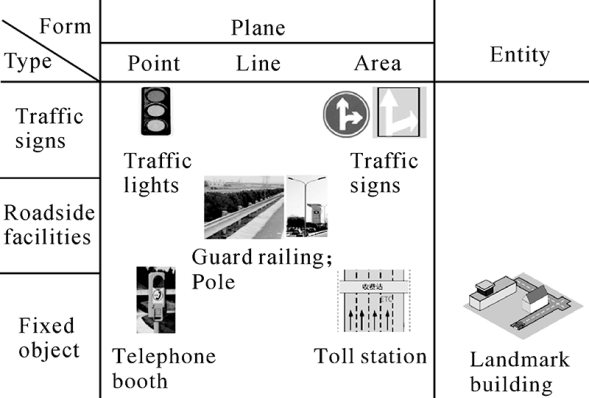
Fig.3
The traffic facilities schematic diagram of intelligent high-precision map"
Tab.3
The real-time data layer diagram of intelligent high-precision map"
| Data type | Content | Attributes | Performance method (example) | Service function |
|---|---|---|---|---|
| Traffic restriction information | Road works, traffic control, traffic incidents, weather conditions, etc. | Road surface condition, visibility, limit start point, limit end point, limit length, influence range, lane ID, etc. | | |
| Traffic flow information | Real-time traffic con-gestion level, predict traffic congestion level, etc. | Passing time, congestion start point, congestion end point, congestion length, road travel time, congestion degree (color), lane ID, etc. | | Dynamic path planning, vehicle control |
| Service area information | Parking space, load level of service area, etc. | Parking space width, parking space start point, parking space end point, parking space length, service area congestion degree (color), lane ID, etc. | |
Tab.4
The dynamic data layer diagram of intelligent high-precision map"
| Data type | Content | Attributes | Performance method (example) | Service function |
|---|---|---|---|---|
| Actively perceive dynamic information | Vehicle sensors actively sense nearby vehicles, pedestrians, traffic lights, etc. | Type, bearing, GNSS positioning data, distance, speed, course, etc. | | Dynamic path planning, vehicle control |
| Passively perceive dynamic information | Nearby vehicles, pedestrians, traffic lights, etc. obtained from various sources other than vehicle sensors | Type, bearing, GNSS positioning data, distance, speed, course, etc. |
Tab.5
The user model layer diagram of intelligent high-precision map"
| Data type | Content | Schematic diagram | Service function |
|---|---|---|---|
| Driving record data set | Vehicle configuration (sensor configuration, processing chip, communication equipment, vehicle performance, etc.) Scene information (natural environment, application, travel tasks, road conditions, etc.) Cognitive characteristics (personal age, cultural background, professional background, personalized needs, etc.) Driving behavior (horizontal and vertical control, following distance, etc.) | | Personalized path planning |
| Driving experience data set | Hazardous area, speed configuration of characteristic road conditions, user needs, etc. |

Fig.4
The data logic structure and application of intelligent high-precision map"
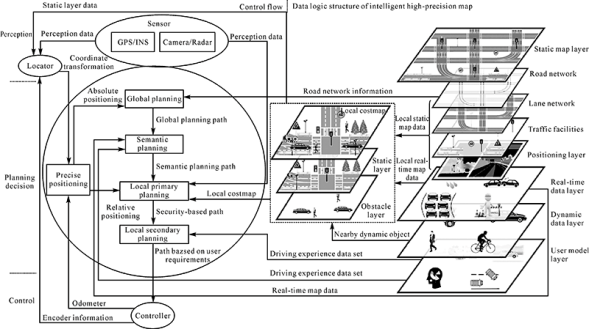

Fig.5
The computing mode schematic diagram of “Crowdsourcing+Edge-Cloud Collaborative Computing” of intelligent high-precision map"
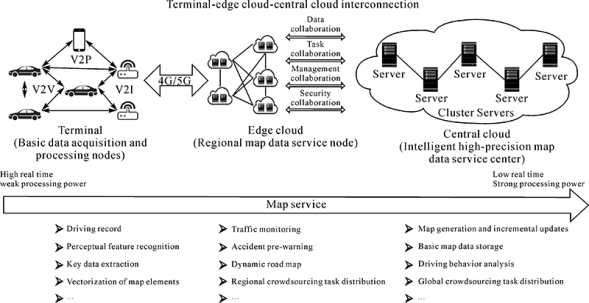
Fig.6
The reference diagram of crowdsourcing data processing based on artificial intelligence technology[38,41-42,49,52-53]"
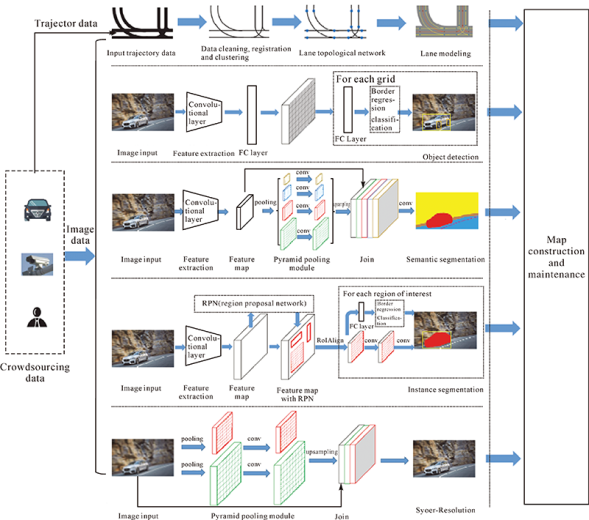
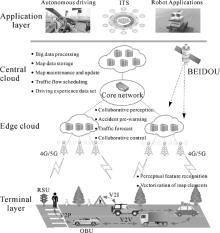
Fig.7
The application scenario of vehicle-infrastructure integration of intelligent high-precision map"
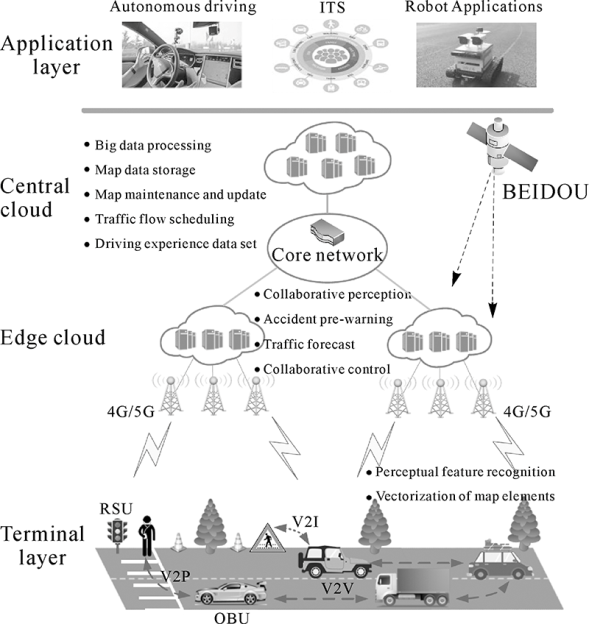

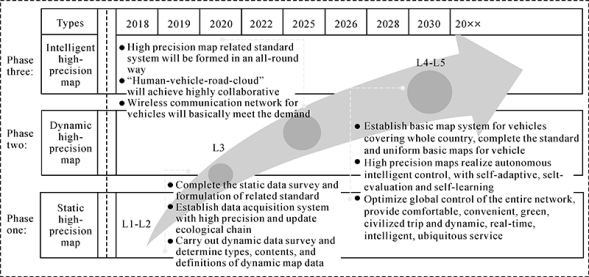
Fig.8
The development roadmap of intelligent high-precision map"
| [1] | MATTHAEI R, BAGSCHIK G, MAURER M. Map-relative localization in lane-level maps for ADAS and autonomous driving[C]∥ Proceedings of 2014 IEEE Intelligent Vehicles Symposium. Dearborn, Michigan: IEEE, 2014: 49-55. |
| [2] | SHIM I, CHOI J, SHIN S , et al. An autonomous driving system for unknown environments using a unified map[J]. IEEE Transactions on Intelligent Transportation Systems, 2015,16(4):1999-2013. |
| [3] | JO K, SUNWOO M . Generation of a precise roadway map for autonomous cars[J]. IEEE Transactions on Intelligent Transportation Systems, 2014,15(3):925-937. |
| [4] | SAE International . Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles[M]. USA: SAE International, 2016. |
| [5] | LIU Shaoshan, TANG Jie, WU Shuang , et al. The first book on driverless technology[M]. Beijing: Publishing House of Electronics Industry, 2017: 180-191. |
| [6] | GUO Chi, GUO Wenfei, CAO Guangyi , et al. A lane-level LBS system for vehicle network with high-precision BDS/GPS positioning[J]. Computational Intelligence and Neuroscience, 2015,: 531321. |
| [7] | LEVINSON J, MONTEMERLO M, THRUN S. Map-based precision vehicle localization in urban environments [C]∥Proceedings of Robotics: Science and Systems III. Atlanta, GA:Mit, 2007: 1. |
| [8] | BAUER S, ALKHORSHID Y, WANIELIK G. Using high-definition maps for precise urban vehicle localization [C]∥Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems. Rio de Janeiro, Brazil: IEEE, 2016: 492-497. |
| [9] | SEIF H G, HU Xiaolong . Autonomous driving in the iCity—HD maps as a key challenge of the automotive industry[J]. Engineering, 2016,2(2):159-162. |
| [10] | LEVINSON J, THRUN S. Robust vehicle localization in urban environments using probabilistic maps [C]∥Proceedings of 2010 IEEE International Conference on Robotics and Automation. Anchorage, Alaska: IEEE, 2010: 4372-4378. |
| [11] | SCHREIBER M, KNÖPPEL C, FRANKE U. LaneLoc: lane marking based localization using highly accurate maps [C]∥Proceedings of 2013 IEEE Intelligent Vehicles Symposium (IV). Gold Coast, Australia: IEEE, 2013: 449-454. |
| [12] | FAIRFIELD N, URMSON C. Traffic light mapping and detection [C]∥Proceedings of 2011 IEEE International Conference on Robotics and Automation. Shanghai: IEEE, 2011: 5421-5426. |
| [13] | CHEN Mian, LIU Xiaomei, SHEN Chunying . Multimedia electronic map (atlas) information transfer[J]. Science of Surveying and Mapping, 2003,28(3):23-26. |
| [14] | WANG Jiayao . Cartography in the age of spatio-temporal big data[J]. Acta Geodaetica et Cartographica Sinica, 2017,46(10):1226-1237. DOI: 10.11947/j.AGCS.2017.20170308. |
| [15] | LIU Fang, YOU Xiong, YU Jianfeng , et al. A Study of information transmission model of Web map[J]. Bulletin of Surveying and Mapping, 2009, ( 10):15-17. |
| [16] | MA Jingzhen, SUN Qun, XIAO Qiang , et al. Research on spatial information transmission based on volunteered geographical information[J]. Geospatial Information, 2016,14(7):9-11, 19. |
| [17] | YANG Zhenkai . Research on information transmission model of personalized map[J]. Geospatial Information, 2018,16(9):55-57. |
| [18] | WANG Jiayao, WU Fang, GUO Jianzhong , et al. Challenges and opportunities of Spatio-temporal big data[J]. Science of Surveying and Mapping, 2017,42(7):1-7. |
| [19] | WANG Jiayao . Development trends of cartography and geographic information engineering[J]. Acta Geodaetica et Cartographica Sinica, 2010,39(2):115-119, 128. |
| [20] | Editorial Department of China Journal of Highway and Transport. Review on China’s automotive engineering research progress: 2017[J]. China Journal of Highway and Transport, 2017,30(6):1-197. |
| [21] | HE Yong, LU Hao, WANG Chunxiang , et al. Generation of precise lane-level maps based on multi-sensors[J]. Journal of Chang’an University (Natural Science Edition), 2015,35(S1):274-278. |
| [22] | LIU Chaoran, JIANG Kun, YANG Diange , et al. Design of a multi-layer lane-level map for vehicle route planning[J]. MATEC Web of Conferences, 2017,124:03001. |
| [23] | Navigation Data Standard. Publishing high-accuracy map standard for companies: industrial consortium pushes autonomous driving[EB/OL]. (2016-09-14). https:∥www.prnewswire.com/news-releases/publishing-high-accuracy-map-standard-for-companies-industrial-consortium-pushes-autonomous-driving-593363311.html . |
| [24] | SHIMADA H, YAMAGUCHI A, TAKADA H , et al. Implementation and evaluation of local dynamic map in safety driving systems[J]. Journal of Transportation Technologies, 2015,5(2):102-112. |
| [25] | DUPUIS M, STROBL M, GREZLIKOWSKI H. OpenDRIVE 2010 and beyond-status and future of the de facto standard for the description of road networks[C]∥ Proceedings of the Driving Simulation-Conference Europe 2010. Paris: [s.n.], 2010: 231-242. |
| [26] | LIU Jingnan, WU Hangbin, GUO Chi , et al. Progress and consideration of high precision road navigation map[J]. Strategic Study of CAE, 2018,20(2):99-105. |
| [27] | THTUN S, BURGARD W, FOX D. Probabilistic robotics[M]. Cambridge, Massachusetts: The MIT Press, 2005. |
| [28] | Edge Computing Consortium. Edge computing reference architecture 3.0[EB/OL]. ( 2019-02-25). http:∥www.ecconsortium.net/Uploads/file/20190225/1551059767474697.pdf. |
| [29] | SATYANARAYANAN M . The emergence of edge computing[J]. Computer, 2017,50(1):30-39. |
| [30] | SHI Weisong, CAO Jie, ZHANG Quan , et al. Edge computing: vision and challenges[J]. IEEE Internet of Things Journal, 2016,3(5):637-646. |
| [31] | Alibaba Cloud Computing Co. Ltd., CESI, et al. White paper on technologies and standardization of edge cloud computing(2018)[EB/OL]. (2018-12-14). http:∥www.cesi.cn/images/editor/20181214/20181214115429307.pdf. |
| [32] | FENG Jianhong, LI Guoliang, FENG Jianhua . A survey on crowdsourcing[J]. Chinese Journal of Computers, 2015,38(9):1713-1726. |
| [33] | HINTON G E, SALAKHUTDINOV R R . Reducing the dimensionality of data with neural networks[J]. Science, 2006,313(5786):504-507. |
| [34] | ZHANG Xinyu, GAO Hongbo, ZHAO Jianhui , et al. Overview of deep learning intelligent driving methods[J]. Journal of Tsinghua University (Science and Technology), 2018,58(4):438-444. |
| [35] | WANG Kejun, ZHAO Yandong, XING Xianglei . Deep learning in driverless vehicles[J]. CAAI Transactions on Intelligent Systems, 2018,13(1):55-69. |
| [36] | WONG N, CHAMBERS C, STOL K, et al. Autonomous vehicle following using a robotic driver [C]∥Proceedings of the 15th International Conference on Mechatronics and Machine Vision in Practice. Auckland, New Zealand: IEEE, 2008: 115-120. |
| [37] | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection [C]∥Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, NV: IEEE, 2016: 779-788. |
| [38] | WANG Xiaolong, GUPTA A. Generative image modeling using style and structure adversarial networks [C]∥Proceedings of the 14th European Conference on Computer Vision. Amsterdam, The Netherlands: Springer, 2016: 318-335. |
| [39] | LIU Wei, ANGUELOV D, ERHAN D, et al. SSD: Single shot multibox detector[C]∥Proceedings of the 14th European Conference on Computer Vision. Amsterdam, The Netherlands: Springer, 2016: 21-37. |
| [40] | HE Kaiming, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN [C]∥Proceedings of 2017 IEEE International Conference on Computer Vision. Venice, Italy: IEEE, 2017: 2980-2988. |
| [41] | ZHAO Hengshuang, SHI Jianping, QI Xiaojuan, et al. Pyramid scene parsing network [C]∥Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, HI: IEEE, 2017: 6230-6239. |
| [42] | ZHANG Shifeng, WEN Longyin, BIAN Xiao, et al. Single-shot refinement neural network for object detection [C]∥Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City, UT: IEEE, 2018: 4203-4212. |
| [43] | WANG K, GOU C, DUAN Y , et al. Generative adversarial networks:introduction and outlook[J]. IEEE/CAA Journal of Automatica Sinica, 2017,004(004):588-598. |
| [44] | ARJOVSKY M, CHINTALA S, BOTTOU L. Wasserstein generative adversarial networks [C]∥Proceedings of the 34th International Conference on Machine Learning. Sydney, NSW: ACM, 2017: 214-223. |
| [45] | CRESWELL A, WHITE T, DUMOULIN V , et al. Generative adversarial networks: an overview[J]. IEEE Signal Processing Magazine, 2018,35(1):53-65. |
| [46] | FISCHER T, KRAUSS C . Deep learning with long short-term memory networks for financial market predictions[J]. European Journal of Operational Research, 2018,270(2):654-669. |
| [47] | DAI C, LIU X, LAI J . Human action recognition using two-stream attention based LSTM networks[J]. Applied soft computing, 2020,86:105820. |
| [48] | ZHAO Zhongqiu, ZHENG Peng, XU Shoutao , et al. Object detection with deep learning: a review[J]. IEEE Transactions on Neural Networks and Learning Systems, 2019,30(11):3212-3232. |
| [49] | DONG Chao, LOY C C, HE Kaiming , et al. Image super-resolution using deep convolutional networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016,38(2):295-307. |
| [50] | DONG Chao, LOY C C, HE Kaiming, et al. Learning a deep convolutional network for image super-resolution [C]∥Proceedings of the 13th European Conference on Computer Vision. Zurich, Switzerland: Springer, 2014: 184-199. |
| [51] | LEDIG C, THEIS L, HUSZÁR F, et al. Photo-realistic single image super-resolution using a generative adversarial network [C]∥Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, HI: IEEE, 2017: 105-114. |
| [52] | YANG Xue, TANG Luliang, NIU Le , et al. Generating lane-based intersection maps from crowdsourcing big trace data[J]. Transportation Research Part C: Emerging Technologies, 2018,89:168-187. |
| [53] | YANG Xue, TANG Luliang, STEWART K , et al. Automatic change detection in lane-level road networks using GPS trajectories[J]. International Journal of Geographical Information Science, 2018,32(3):601-621. |
| [54] | PATHAK D, KRÄHENBÜHL P, DONAHUE J, et al. Context encoders: feature learning by inpainting [C]∥Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, NV: IEEE, 2016: 2536-2544. |
| [55] | YANG Chao, LU Xin, LIN Zhe, et al. High-resolution image inpainting using multi-scale neural patch synconfproc [C]∥Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, HI: IEEE, 2017: 4076-4084. |
| [56] | YEH R A, CHEN Chen, YIAN LIM T, et al. Semantic image inpainting with deep generative models [C]∥Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, HI: IEEE, 2017: 6882-6890. |
| [57] | LI Keqiang, DAI Yifan, LI Shengbo , et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy, 2017,8(1):1-14. |
| [58] | ZANG Andi, LI Zichen, DORIA D, et al. Accurate vehicle self-localization in high definition map dataset [C]∥Proceedings of the 1st ACM SIGSPATIAL Workshop on High-Precision Maps and Intelligent Applications for Autonomous Vehicles. Redondo Beach, CA: ACM, 2017: 1-8. |
| [59] | WAN Guowei, YANG Xiaolong, CAI Remlan, et al. Robust and precise vehicle localization based on multi-sensor fusion in diverse city scenes[C]∥Proceedings of 2018 IEEE International Conference on Robotics and Automation (ICRA). Brisbane, Australia: IEEE, 2018: 4670-4677. |
| [60] | THRUN S . Learning occupancy grid maps with forward sensor models[J]. Autonomous Robots, 2003,15(2):111-127. |
| [61] | OHYA A, NAGASHIMA Y, YUTA S I. Exploring unknown environment and map construction using ultrasonic sensing of normal direction of walls[C]∥Proceedings of 1994 IEEE International Conference on Robotics and Automation. San Diego, CA: IEEE, 1994: 485-492. |
| [62] | TOMONO M . 3-D object map building using dense object models with sift-based recognition features [C]∥Proceedings of 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing: IEEE, 2006: 1885-1890. |
| [63] | KOSTAVELIS I, GASTERATOS A . Semantic mapping for mobile robotics tasks: a survey[J]. Robotics and Autonomous Systems, 2015,66:86-103. |
| [64] | HIETANEN S . Mobility as a service[J]. The New Transport Model, 2014,12(2):2-4. |
| [65] | JITTRAPIROM P, CAIATI V, FENERI A M , et al. Mobility as a service: a critical review of definitions, assessments of schemes, and key challenges[J]. Urban Planning, 2017,2(2):13-25. |
| [66] | GOODALL W, FISHMAN T D, BORNSTEIN J , et al. The rise of mobility as a service[J]. Deloitte Review, 2017,20:112-129. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||