
Journal of Geodesy and Geoinformation Science ›› 2019, Vol. 2 ›› Issue (2): 38-49.doi: 10.11947/j.JGGS.2019.0205
Previous Articles Next Articles
Kaichang DI1,Wenhui WAN1,Hongying ZHAO2,Zhaoqin LIU1,Runzhi WANG1,Feizhou ZHANG2( )
)
Received:2018-10-05
Accepted:2019-03-11
Online:2019-06-20
Published:2020-03-20
Contact:
Feizhou ZHANG
E-mail:zhangfz@pku.edu.cn
About author:Kaichang DI(1967—), male, PhD, research fellow, PhD supervisor, majors in planetary mapping, visual localization and navigation. E-mail: dikc@radi.ac.cn
Supported by:Kaichang DI,Wenhui WAN,Hongying ZHAO,Zhaoqin LIU,Runzhi WANG,Feizhou ZHANG. Progress and Applications of Visual SLAM[J]. Journal of Geodesy and Geoinformation Science, 2019, 2(2): 38-49.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
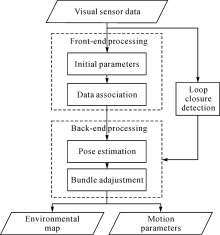
Fig.1
Flowchart of typical visual SLAM"
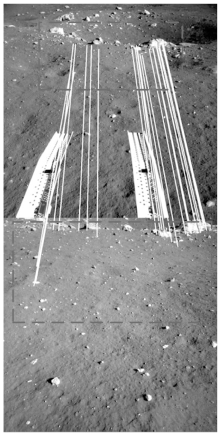
Fig.2
Matching results in cross-site navcam images of Yutu rover"

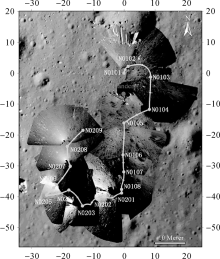
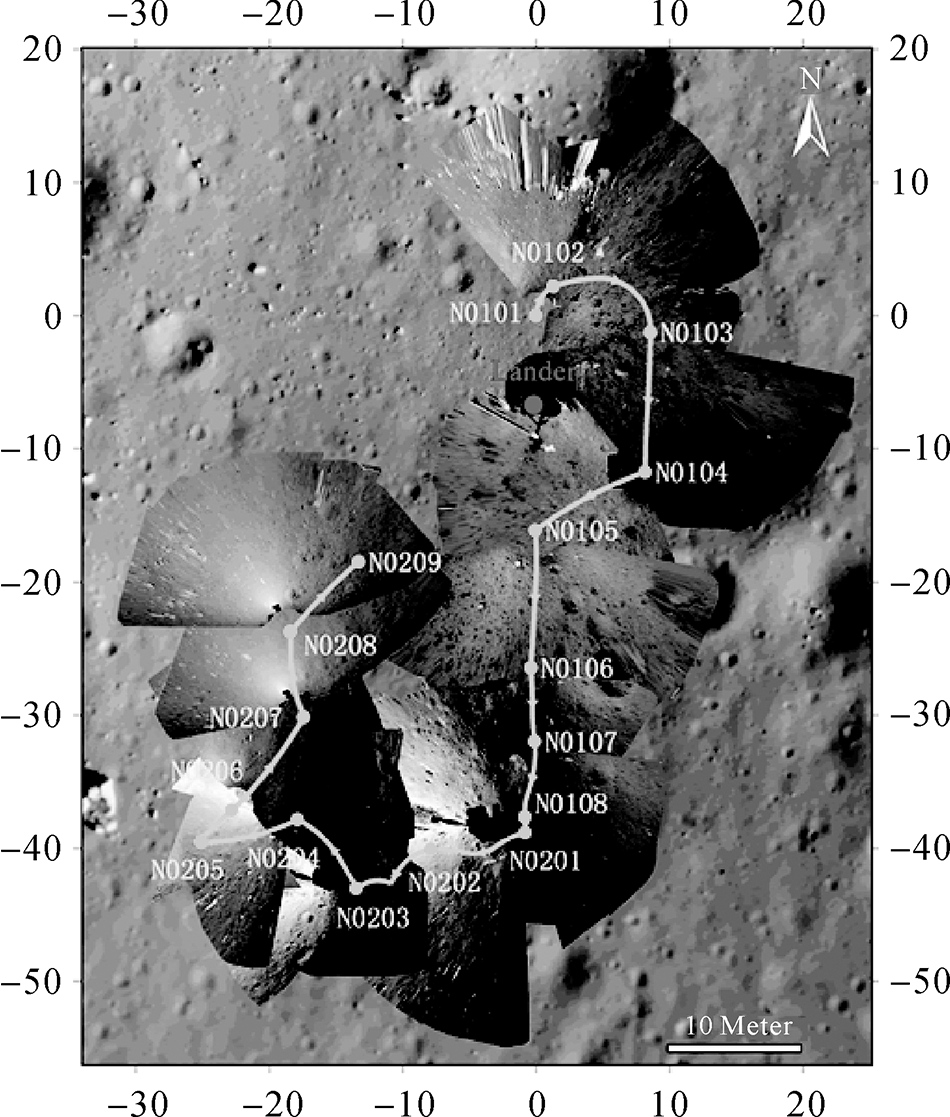
Fig.3
Traverse of Yutu rover based on visual localization"
| [1] | LU Shaofang, LIU Dawei . A Survey of Research Situation on Navigation by Autonomous Mobile Robot and Its Related Techniques[J]. Transactions of the Chinese Society for Agricultural Machinery, 2002,33(2):112-116. |
| [2] | ALBRECHT S . An Analysis of Visual Mono-SLAM[D]. Canada: Universität Osnabrück, 2009: 1-4. https://www.researchgate.net/publication/268031790_an_analysis_of_visual_mono-slam |
| [3] | FUENTES-PACHECO J, RUIZ-ASCENCIO J, RENDÓN-MANCHA J M . Visual Simultaneous Localization and Mapping:A Survey[J]. Artificial Intelligence Review, 2015,43(1):55-81.DOI: 10.1007/s10462-012-9365-8 |
| [4] | IDO J, SHIMIZU Y, MATSUMOTO Y , et al. Indoor Navigation for a Humanoid Robot Using a View Sequence[J]. The International Journal of Robotics Research, 2009,28(2):315-325.DOI: 10.1177/0278364908095841 |
| [5] | ÇELIK K, SOMANI A K . Monocular Vision SLAM for Indoor Aerial Vehicles[J]. Journal of Electrical and Computer Engineering, 2013,2013:374165. |
| [6] | COMPORT A I, MARCHAND E, PRESSIGOUT M . Real-time Markerless Tracking for Augmented Reality:The Virtual Visual Servoing Framework[J]. IEEE Transactions on Visualization and Computer Graphics, 2006,12(4):615-628. DOI: 10.1109/TVCG.2006.78 |
| [7] | CHEKHLOV D, GEE A P, CALWAY a , et al. Ninja on a Plane: Automatic Discovery of Physical Planes for Augmented Reality Using Visual SLAM [C]//Proceedings of the 6th IEEE and ACM International Symposium on Mixed and Augmented Reality. Nara, Japan: IEEE, 2007: 13-16. |
| [8] | CADENA C, CARLONE L, CARRILLO H , et al. Past, Present, and Future of Simultaneous Localization and Mapping:Toward the Robust-perception Age[J]. IEEE Transactions on Robotics, 2016,32(6):1309-1332. DOI: 10.1109/TRO.2016.2624754 |
| [9] | GAO Xiang, ZHANG Tao, LIU Yi , et al. Visual SLAM Fourteen Lectures-From Theory to Practice[M]. Bejing: China Machine Press, 2017: 17-22. |
| [10] | KARLSSON N, DI BERNARDO E, OSTROWSKI J , et al. The vSLAM Algorithm for Robust Localization and Mapping [C]//Proceedings of 2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain: IEEE, 2005. |
| [11] | SVNDERHAUF N, PROTZEL P . Towards A Robust Back-end for Pose Graph SLAM [C]//Proceedings of 2012 IEEE International Conference on Robotics and Automation. Saint Paul, MN: IEEE, 2012. |
| [12] | HU G, KHOSOUSSI K, HUANG Shoudong . Towards a Reliable SLAM Back-end [C]//Proceedings of 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan: IEEE, 2013. |
| [13] | NEWMAN P, HO K . SLAM-loop Closing with Visually Salient Features [C]//Proceedings of 2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain: IEEE, 2005. |
| [14] | HO K L, NEWMAN P . Loop Closure Detection in SLAM by Combining Visual and Spatial Appearance[J]. Robotics and Autonomous Systems, 2006,54(9):740-749.DOI: 10.1016/j.robot.2006.04.016 |
| [15] | HARRIS C, STEPHENS M . A Combined Corner and Edge Detector [C]//Proceedings of the 4th Alvey Vision Conference. Manchester, UK: Alvety Vision Club, 1988. |
| [16] | FÖRSTNER W, GVLCH E . A Fast Operator for Detection and Precise Location of Distinct Points, Corners and Centers of Circular Features [C]//Proceedings of the ISPRS Intercommission Conference on Fast Processing of Photogrammetric Data. Interlaken, Switzerland: ISPRS, 1987. |
| [17] | OLSON C F, MATTHIES L H, SCHOPPERS M , et al. Rover Navigation using Stereo Ego-motion[J]. Robotics and Autonomous Systems, 2003,43(4):215-229. DOI: 10.1016/S0921-8890(03)00004-6 |
| [18] | NISTÉR D, NARODITSKY O, BERGEN J . Visual Odometry for Ground Vehicle Applications[J]. Journal of Field Robotics, 2006,23(1):3-20. DOI: 10.1002/(ISSN)1556-4967. |
| [19] | KIM J, KWEON I S . Robust Feature Matching for Loop Closing and Localization [C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, CA: IEEE, 2007. |
| [20] | AGRAWAL M, KONOLIGE K . Real-time Localization in Outdoor Environments using Stereo Vision and Inexpensive GPS [C]//Proceedings of the 18th International Conference on Pattern Recognition. Hong Kong, China: IEEE, 2006. |
| [21] | SHI Jianbo, TOMASI C . Good Features to Track [C]//Proceedings of IEEE Conference on Computer Vision and Pattern Recognition. Seattle, WA: IEEE, 1994. |
| [22] | HERATH D C, KODAGODA S, DISSANAYAKE G . Simultaneous Localisation and Mapping: A Stereo Vision Based Approach [C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing, China: IEEE, 2006. |
| [23] | LOWE D G . Object Recognition from Local Scale-Invariant Features [C]//Proceedings of the 7th IEEE International Conference on Computer Vision. Kerkyra, Greece: IEEE, 1999. 1150-1157. |
| [24] | LOWE D G . Distinctive Image Features from Scale-invariant Keypoints[J]. International Journal of Computer Vision, 2004,60(2):91-110. |
| [25] | MOREL J M, YU Guoshen . Is SIFT Scale Invariant?[J]. Inverse Problems and Imaging, 2011,5(1):1-22. |
| [26] | BAY H, TUYTELAARS T, GOOL V L . SURF: Speeded Up Robust Features [C]//Proceedings of the 9th European Conference on Compute Vision. Graz, Austria: Springer, 2006: 404-417. |
| [27] | BAY H, ESS A, TUYTELAARS T , et al. Speeded-Up Robust Features (SURF)[J]. Computer Vision and Image Understanding, 2008,110(3):346-359. DOI: 10.1016/j.cviu.2007.09.014 |
| [28] | AGRAWAL M, KONOLIGE K, BLAS M R . CenSurE: Center Surround Extremas for Realtime Feature Detection and Matching [C]//Proceedings of European Conference on Computer Vision. Marseille, France: INRIA Grenoble, 2008: 102-115. |
| [29] | LEUTENEGGER S, CHLI M, SIEGWART R Y . BRISK: Binary Robust Invariant Scalable Keypoints [C]//Proceedings of IEEE International Conference on Computer Vision. Barcelona, Spain: IEEE, 2011. |
| [30] | RUBLEE E, RABAUD V, KONOLIGE K , et al. ORB: An Efficient Alternative to SIFT or SURF [C]//Proceedings of IEEE International Conference on Computer Vision. Barcelona, Spain: IEEE, 2011. |
| [31] | MUR-ARTAL R, MONTIEL J M M, TARDÓS J D . ORB-SLAM:A Versatile and Accurate Monocular SLAM System[J]. IEEE Transactions on Robotics, 2015,31(5):1147-1163.DOI: 10.1109/TRO.2015.2463671 |
| [32] | GIL A, MOZOS O M, BALLESTA M , et al. A Comparative Evaluation of Interest Point Detectors and Local Descriptors for Visual SLAM[J]. Machine Vision and Applications, 2010,21(6):905-920. DOI: 10.1007/s00138-009-0195-x |
| [33] | HARTMANN J, KLUSSENDORFF J H, MAEHLE E . A Comparison of Feature Descriptors for Visual SLAM [C]//Proceedings of 2013 European Conference on Mobile Robots. Barcelona, Spain: IEEE, 2013. |
| [34] | GAUGLITZ S, HÖLLERER T, TURK M . Evaluation of Interest Point Detectors and Feature Descriptors for Visual Tracking[J]. International Journal of Computer Vision, 2011,94(3):335-360.DOI: 10.1007/s11263-011-0431-5 |
| [35] | MIKSIK O, MIKOLAJCZYK K . Evaluation of Local Detectors and Descriptors for Fast Feature Matching [C]//Proceedings of the 21st International Conference on Pattern Recognition. Tsukuba, Japan: IEEE, 2012. |
| [36] | SMITH R C, CHEESEMAN P . On the Representation of Spatial Uncertainty[J]. International Journal of Robotics Research, 1986,5(4):56-68. DOI: 10.1177/027836498600500404 |
| [37] | SMITH R, SELF M, CHEESEMAN P . Estimating Uncertain Spatial Relationships in Robotics[M] //COX I J, WILFONG G T. Autonomous Robot Vehicles. New York: Springer, 1990: 167-198. |
| [38] | THRUN S, BURGARD W, FOX D. Probabilistic Robotics[M]. Massachusetts: MIT Press, 2005: 1-5. |
| [39] | AULINAS J, PETILLOT Y R, SALVI J , et al. The SLAM Problem: A Survey[C]//Proceedings of the 2008 conference on Artificial Intelligence Research and Development: Proceedings of the 11th International Conference of the Catalan Association for Artificial Intelligence. Amsterdam, The Netherlands: IOS Press, 2008. |
| [40] | KALMAN R E . A New Approach to Linear Filtering and Prediction Problems[J]. Journal of Basic Engineering, 1960,82(1):35-45. DOI: 10.1115/1.3662552 |
| [41] | CHATILA R, LAUMOND J . Position Referencing and Consistent World Modeling for Mobile Robots [C]//Proceedings of IEEE International Conference on Robotics and Automation. St. Louis, MO: IEEE, 1985. |
| [42] | CROWLEY J L . World Modeling and Position Estimation for A Mobile Robot using Ultrasonic Ranging [C]//Proceedings of IEEE International Conference on Robotics and Automation. Scottsdale, AZ: IEEE, 1989. |
| [43] | KALMAN R E, BUCY R S . New Results in Linear Filtering and Prediction Theory[J]. Journal of Basic Engineering, 1961,83(1):95-108. DOI: 10.1115/1.3658902 |
| [44] | DURRANT-WHYTE H, BAILEY T . Simultaneous Localization and Mapping:Part Ⅰ[J]. IEEE Robotics & Automation Magazine, 2006,13(2):99-110. |
| [45] | THRUN S, BURGARD W, FOX D . A Probabilistic Approach to Concurrent Mapping and Localization for Mobile Robots[J]. Machine Learning, 1998,31(1-3):29-53. |
| [46] | WAN E A, VAN DER MERWE R . The Unscented Kalman Filter for Nonlinear Estimation [C]//Proceedings of IEEE Adaptive Systems for Signal Processing, Communications, and Control Symposium 2000, Lake Louise, Alberta, Canada: IEEE, 2000. |
| [47] | ARASARATNAM I, HAYKIN S . Cubature Kalman Filters[J]. IEEE Transactions on Automatic Control, 2009,54(6):1254-1269. DOI: 10.1109/TAC.2009.2019800 |
| [48] | ITO K, XIONG K . Gaussian Filters for Nonlinear Filtering Problems[J]. IEEE Transactions on Automatic Control, 2000,45(5):910-927. DOI: 10.1109/9.855552 |
| [49] | DOUCET A, GODSILL S, ANDRIEU C . On Sequential Monte Carlo Sampling Methods for Bayesian Filtering[J]. Statistics and Computing, 2000,10(3):197-208.DOI: 10.1023/A:1008935410038 |
| [50] | MONTEMERLO M, THRUN S, KOLLER D , et al. FastSLAM: A Factored Solution to the Simultaneous Localization and Mapping Problem [C]//Proceedings of AAAI National Conference on Artificial Intelligence. Edmonton, Canada: AAAI, 2002: 593-598. |
| [51] | MONTEMERLO M, THRUN S, ROLLER D , et al. FastSLAM 2. 0: An improved Particle Filtering Algorithm for Simultaneous Localization and Mapping that Provably Converges [C]//Proceedings of the 18th International Joint Conference on Artificial Intelligence. Acapulco, Mexico: Morgan Kaufmann Publishers Inc., 2003: 1151-1156. |
| [52] | LU F, MILIOS E . Globally Consistent Range Scan Alignment for Environment Mapping[J]. Autonomous Robots, 1997,4(4):333-349. DOI: 10.1023/A:1008854305733 |
| [53] | GUTMANN J S, KONOLIGE K . Incremental Mapping of Large Cyclic Environments [C]//Proceedings of IEEE International Symposium on Computational Intelligence in Robotics and Automation. Monterey, CA: IEEE, 1999. |
| [54] | FRESE U, LARSSON P, DUCKETT T . A Multilevel Relaxation Algorithm for Simultaneous Localization and Mapping[J]. IEEE Transactions on Robotics, 2005,21(2):196-207.DOI: 10.1109/TRO.2004.839220 |
| [55] | OLSON E, LEONARD J, TELLER S . Fast Iterative Alignment of Pose Graphs with Poor Initial Estimates [C]//Proceedings of IEEE International Conference on Robotics and Automation. Orlando, FL: IEEE, 2006. |
| [56] | ZHAO Liang. MonoSLAM: Theories of Parameterization, Bundle Adjustment and Subgraph Fusion[D]. Beijing: Peking University, 2012. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y2498852 |
| [57] | DELLAERT F, KAESS M . Square Root SAM:Simultaneous Localization and Mapping via Square Root Information Smoothing[J]. International Journal of Robotics Research, 2006,25(12):1181-1203. DOI: 10.1177/0278364906072768 |
| [58] | KAESS M, RANGANATHAN A, DELLAERT F . iSAM: Fast Incremental Smoothing and Mapping with Efficient Data Association [C]//Proceedings of IEEE International Conference on Robotics and Automation. Roma, Italy: IEEE, 2007. |
| [59] | KAESS M, JOHANNSSON H, ROBERTS R , et al. iSAM2:Incremental Smoothing and Mapping Using the Bayes Tree[J]. International Journal of Robotics Research, 2012,31(2):216-235.DOI: 10.1177/0278364911430419 |
| [60] | BAILEY T, DURRANT-WHYTE H . Simultaneous Localization and Mapping:Part Ⅱ[J]. IEEE Robotics & Automation Magazine, 2006,13(3):108-117. |
| [61] | RUBNER Y, TOMASI C, GUIBAS L J . A Metric for Distributions with Applications to Image Databases [C]//Proceedings of IEEE International Conference on Computer Vision. Bombay, India: IEEE, 1998. |
| [62] | BOSSE M, NEWMAN P, LEONARD S J J , et al. SLAM in Large-scale Cyclic Environments Using the Atlas Framework[J]. International Journal of Robotics Research, 2004,23:1113-1139.DOI: 10.1177/0278364904049393 |
| [63] | EADE E, DRUMMOND T. Unified Loop Closing and Recovery for Real Time Monocular SLAM[C]//Proceedings of the British Conference on Machine Vision. Leeds: BMVA Press, 2008. |
| [64] | ANGELI A, DONCIEUX S, MEYER J A , et al. Real-time Visual Loop-closure Detection [C]//Proceedings of IEEE International Conference on Robotics and Automation. Pasadena, CA: IEEE, 2008. 4300-4305. |
| [65] | SMITH P, REID I D, DAVISON A J. Real-time Monocular SLAM with Straight Lines[C]//Proceedings of British Conference on Machine Vision. Edinburgh, UK: BMVA Press, 2006: 17-26. |
| [66] | LEMAIRE T, LACROIX S . Monocular-vision based SLAM Using Line Segments [C]//Proceedings of IEEE Robotics and Automation. Roma, Italy: IEEE, 2007. |
| [67] | SOLÀ J, VIDAL-CALLEJA T, DEVY M . Undelayed Initialization of Line Segments in Monocular SLAM [C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. St. Louis, MO: IEEE, 2009. |
| [68] | PERDICES E, LÓPEZ L M, CAÑAS J M . LineSLAM: Visual Real Time Localization Using Lines and UKF[M]//ARMADA A, SANFELIU A, FERRE M. ROBOT2013: First Iberian Robotics Conference. Cham: Springer, 2014. |
| [69] | ZHOU Huazhong, ZOU Danping, PEI Ling , et al. Struct SLAM:Visual SLAM With Building Structure Lines[J]. IEEE Transactions on Vehicular Technology, 2015,64(4):1364-1375.DOI: 10.1109/TVT.2015.2388780 |
| [70] | PUMAROLA A, VAKHITOV A, AGUDO A , et al. PL-SLAM: Real-time Monocular Visual SLAM with Points and Lines [C]//Proceedings of IEEE International Conference on Robotics and Automation. Singapore: IEEE, 2017. |
| [71] | LI Haifeng, HU Zunhe, CHEN Xinwei . PLP-SLAM:A Visual SLAM Method Based on Point-line-plane Feature Fusion[J]. Robot, 2017,39(2):214-220, 229. |
| [72] | SILVERIA G, MALIS E, RIVES P . An Efficient Direct Approach to Visual SLAM[J]. IEEE Transactions on Robotics, 2008,24(5):969-979. DOI: 10.1109/TRO.2008.2004829 |
| [73] | ENGEL J, KOLTUN V, CREMERS D . Direct Sparse Odometry[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018,40(3):611-625. DOI: 10.1109/TPAMI.2017.2658577 |
| [74] | FORSTER C, PIZZOLI M, SCARAMUZZA D . SVO: Fast Semi-direct Monocular Visual Odometry [C]//Proceedings of IEEE International Conference on Robotics and Automation. Hong Kong, China: IEEE, 2014. |
| [75] | ENGEL J, SCHÖPS T, CREMERS D . LSD-SLAM: Large-scale Direct Monocular SLAM [C]//Proceedings of the 13th European Conference on Computer Vision. Zurich, Switzerland: Springer, 2014: 834-849. |
| [76] | CORKE P, LOBO J, DIAS J . An Introduction to Inertial and Visual Sensing[J]. International Journal of Robotics Research, 2007,26(6):519-535. DOI: 10.1177/0278364907079279 |
| [77] | LI Mingyang, MOURIKIS A I . High-precision, Consistent EKF-based Visual-inertial Odometry[J]. International Journal of Robotics Research, 2013,33(6):690-711. |
| [78] | LEUTENEGGER S, LYNEN S, BOSSE M , et al. Keyframe-based Visual-inertial Odometry Using Nonlinear Optimization[J]. International Journal of Robotics Research, 2014,34(3):314-334. |
| [79] | MU Xufu, CHEN Jing, ZHOU Zixiang , et al. Accurate Initial State Estimation in a Monocular Visual-inertial SLAM System[J]. Sensor, 2018,18(2):506. DOI: 10.3390/s18020506 |
| [80] | WAN Wenhui. Theory and Methods of Stereo Vision Based Autonomous Rover Localization in Deep Space Exploration[D]. Beijng: Graduate School of Chinese Academy of Sciences, 2012. http://www.irgrid.ac.cn/handle/1471x/823847 |
| [81] | WU Kai. Monocular Vision Integrated with Laser Distance Meter for Astronaut Navigation on Lunar Surface[D]. Beijng: University of Chinese Academy of Sciences, 2013. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y2609688 |
| [82] | WU Kai, DI Kaichang, SUN Xun , et al. Enhanced Monocular Visual Odometry Integrated with Laser Distance Meter for Astronaut Navigation[J]. Sensors, , 14(3):4981-5003.DOI: 10.3390/s140304981 |
| [83] | ZHANG Xinzheng, RAD A B, WONG Y K . Sensor Fusion of Monocular Cameras and Laser Rangefinders for Line-based Simultaneous Localization and Mapping (SLAM) Tasks in Autonomous Mobile Robots[J]. Sensors, 2012,12(1):429-452. DOI: 10.3390/s120100429 |
| [84] | DI Kaichang . Remand Analysis and Technical Proposal Discussion about Navigation for Lunar Astronauts [C]//Proceedings of Engineering Science and Technology Forum (107th) of Chinese Academy of Engineering: Manned Lunar Landing and Deep Space Exploration. Beijing: Chinese Accdemy of Engineering 2010: 213-218. |
| [85] | KHOSHELHAM K, ELBERINK S O . Accuracy and Resolution of Kinect Depth Data for Indoor Mapping Applications[J]. Sensors, 2012,12(2):1437-1454. DOI: 10.3390/s120201437 |
| [86] | STURM J, ENGELHARD N, ENDRES F , et al. A Benchmark for the Evaluation of RGB-D SLAM Systems [C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura, Portugal: IEEE, 2012. |
| [87] | KERL C, STURM J, CREMERS D . Dense Visual SLAM for RGB-D Cameras [C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan: IEEE, 2013. |
| [88] | WHELAN T, KAESS M, JOHANNSSON H , et al. Real-time Large-scale Dense RGB-D SLAM with Volumetric Fusion[J]. International Journal of Robotics Research, 2015,34(4-5):598-626.DOI: 10.1177/0278364914551008 |
| [89] | DI Kaichang, ZHAO Qiang, WAN Wenhui , et al. RGB-D SLAM based on Extended Bundle Adjustment with 2D and 3D Information[J]. Sensors, 2016,16(8):1285. DOI: 10.3390/s16081285 |
| [90] | ZHU X X, TUIA D, MOU L C , et al. Deep Learning in Remote Sensing:A Comprehensive Review and List of Resources[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017,5(4):8-36. |
| [91] | ZHANG Zixing, GEIGER J, POHJALAINEN J , et al. Deep Learning for Environmentally Robust Speech Recognition:An Overview of Recent Developments[J]. ACM Transactions on Intelligent Systems and Technology, 2018, 9(5): Article No. 49. |
| [92] | GARCIA-GARCIA A, ORTS-ESCOLANO S, OPERA S , et al. A Review on Deep Learning Techniques Applied to Semantic Segmentation[J]. arXiv preprint arXiv:1704.06857, 2017. |
| [93] | KONDA K, MEMISEVIC R. Learning Visual Odometry with a Convolutional Network[C]//Proceedings of the 10th International Conference on Computer Vision Theory and Applications. Berlin, Germany: SCITCC Press, 2015: 486-490. |
| [94] | DOSOVITSKIY A, FISCHER P, ILG E , et al. FlowNet: Learning Optical Flow with Convolutional Networks [C]//Proceedings of 2015 IEEE International Conference on Computer Vision. Santiago, Chile: IEEE, 2015: 2758-2766. |
| [95] | COSTANTE G, MANCINI M, VALIGI P , et al. Exploring Representation Learning with CNNs for Frame-to-frame Ego-motion Estimation[J]. IEEE Robotics and Automation Letters, 2016,1(1):18-25. DOI: 10.1109/LRA.2015.2505717 |
| [96] | BAI Dongdong, WANG Chaoqun, ZHANG Bo , et al. Matching-range-constrained Real-time Loop Closure Detection with CNNs Features[J]. Robotics and Biomimetics, 2016,3:15.DOI: 10.1186/s40638-016-0047-x |
| [97] | ZHANG X W, SU Y, ZHU X H . Loop Closure Detection for Visual SLAM Systems Using Convolutional Neural Network [C]//Proceedings of IEEE International Conference on Automation and Computing. Huddersfield, UK: IEEE, 2017. |
| [98] | GAO Xiang, ZHANG Tao . Unsupervised Learning to Detect Loops Using Deep Neural Networks for Visual SLAM System[J]. Autonomous Robots, 2017,41(1):1-18. DOI: 10.1007/s10514-015-9516-2 |
| [99] | LI Rongxing, SQUYRES S W, ARVIDON R E , et al. Initial Results of Rover Localization and Topographic Mapping for the 2003 Mars Exploration Rover Mission[J]. Photogrammetric Engineering & Remote Sensing, 2005,71(10):1129-1142. |
| [100] | DI Kaichang, XU Fengliang, WANG Jue , et al. Photogrammetric Processing of Rover Imagery of the 2003 Mars Exploration Rover Mission[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2008,63(2):181-201. DOI: 10.1016/j.isprsjprs.2007.07.007 |
| [101] | MARTIN-MUR T J, KRUIZINGA G L, BUKHART P D , et al. Mars Science Laboratory Navigation Results [C]//Proceedings of International Symposium on Space Flight Dynamics. Washington D. C. : NASA, 2012. |
| [102] | CHENG Yang, MAIMONE M W, MATTHIES L . Visual Odometry on the Mars Exploration Rovers-A Tool to Ensure Accurate Driving and Science Imaging[J]. IEEE Robotics & Automation Magazine, 2006,13(2):54-62. |
| [103] | WAN Wenhui, LIU Zhaoqin, LIU Yiliang , et al. Descent Image Matching based Position Evaluation for Chang’e-3 Landing Point[J]. Spacecraft Engineering, 2014,23(4):5-12. |
| [104] | LIU Bin, XU Bin, LIU Zhaoqin , et al. Descending and Landing Trajectory Recovery of Chang’e-3 Lander using Descent Images[J]. Journal of Remote Sensing, 2014,18(5):988-994.DOI: 10.11834/jrs.20144070 |
| [105] | LIU Zhaoqin, DI Kaichang, PENG Man , et al. High Precision Landing Site Mapping and Rover Localization for Chang’e-3 Mission[J]. Science China-Physics Mechanics & Astronomy, 2015,58(1):1-11. |
| [106] | WAN W H, LIU Z Q, DI K C , et al. A Cross-Site Visual Localization Method for Yutu Rover [C]//Proceedings of ISPRS Technical Commission Ⅳ Symposium. Suzhou, China: ISPRS, 2014. |
| [107] | HUANG Haosheng, GARTNER G . A Survey of Mobile Indoor Navigation Systems[M] //GARTNER G, ORTAG F. Cartography for Central and Eastern European. Berlin, Heidelberg: Springer, 2009. |
| [108] | FALLAH N, APOSTOLOPOULOS I, BEKRIS K , et al. Indoor Human Navigation Systems:A Survey[J]. Interacting with Computers, 2013,25(1):21-33. |
| [109] | FROEHLICH M, AZHAR S, VANTURE M . An Investigation of Google Tango ® Tablet for Low Cost 3D scanning [C]//Proceedings of 34th International Symposium on Automation and Robotics in Construction. Hawaii: ICACR, 2017. |
| [110] | NGUYEN K A, LUO Zhiyuan . On Assessing the Positioning Accuracy of Google Tango in Challenging Indoor Environments [C]//Proceedings of International Conference on Indoor Positioning and Indoor Navigation. Sapporo, Japan: IEEE, 2017. |
| [111] | WINTERHALTER W, FLECKENSTEIN F, STEDER B , et al. Accurate Indoor Localization for RGB-D Smartphones and Tablets Given 2D Floor Plans [C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Hambury, Germany: IEEE, 2015. |
| [112] | LEE J . Mobile AR in Your Pocket with Google Tango[J]. Society for Information Display International Symposium Digest of Technical Papers, 2017,48(1):17-18. DOI: 10.1002/sdtp.11563 |
| [113] | GARON M, BOULET P O, DOIRONZ J P , et al. Real-Time High Resolution 3D Data on the HoloLens [C]//Proceedings of IEEE International Symposium on Mixed and Augmented Reality. Merida, Mexico: IEEE, 2016. |
| [114] | EVANS G, MILLER J, PENA M I , et al. Evaluating the Microsoft HoloLens through an Augmented Reality Assembly Application [C]//Proceedings of SPIE, Volume 10197, Degraded Environments: Sensing, Processing, and Display 2017. Anaheim, CA: SPIE, 2017. |
| [115] | ZHOU Guyue, FANG Lu, TANG Ketan , et al. Guidance: A Visual Sensing Platform for Robotic Applications [C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Boston, MA: IEEE, 2015: 9-14. |
| [116] | MEJIAS L, CORREA J F, MONDRAGON I , et al. COLIBRI: A Vision-Guided UAV for Surveillance and Visual Inspection [C]//Proceedings of IEEE International Conference on Robotics and Automation. Roma, Italy: IEEE, 2015. |
| [117] | KRAJNÍK T, NITSCHE M, PEDRE S , et al. A Simple Visual Navigation System for an UAV [C]//Proceedings of 9th International Multi-Conference on Systems, Signals and Devices. Chemnitz, Germany: IEEE, 2012. |
| [1] | Xiaopeng YAN,Wei ZHOU,Rencan PENG,Wenliang PAN,Lei WANG,Guoxin HU. A Local Reference Frame Construction Method Based on the Signed Surface Variation [J]. Journal of Geodesy and Geoinformation Science, 2021, 4(3): 25-37. |
| [2] | Jian WANG,Houzeng HAN,Fei LIU,Xin CHENG. Performance Analysis of GNSS/MIMU Tight Fusion Positioning Model with Complex Scene Feature Constraints [J]. Journal of Geodesy and Geoinformation Science, 2021, 4(2): 1-13. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||