
Journal of Geodesy and Geoinformation Science ›› 2021, Vol. 4 ›› Issue (2): 1-13.doi: 10.11947/j.JGGS.2021.0201
• Special Issue • Next Articles
Jian WANG1,2( ),Houzeng HAN1(),Fei LIU1,2,Xin CHENG1
),Houzeng HAN1(),Fei LIU1,2,Xin CHENG1
Received:2020-09-15
Accepted:2021-01-15
Online:2021-06-20
Published:2021-07-02
Contact:
Houzeng HAN
E-mail:wangjian@bucea.edu.cn;hanhouzeng@bucea.edu.cn
About author:Jian WANG (1980—), male, PhD, professor, majors in geodesy and survey engineering, and the current research interests focus on GNSS positioning, integrated navigation and Indoor localization. E-mail: Supported by:Jian WANG,Houzeng HAN,Fei LIU,Xin CHENG. Performance Analysis of GNSS/MIMU Tight Fusion Positioning Model with Complex Scene Feature Constraints[J]. Journal of Geodesy and Geoinformation Science, 2021, 4(2): 1-13.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
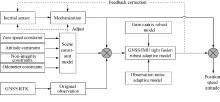
Fig.1
Tight fusion algorithm model architecture"
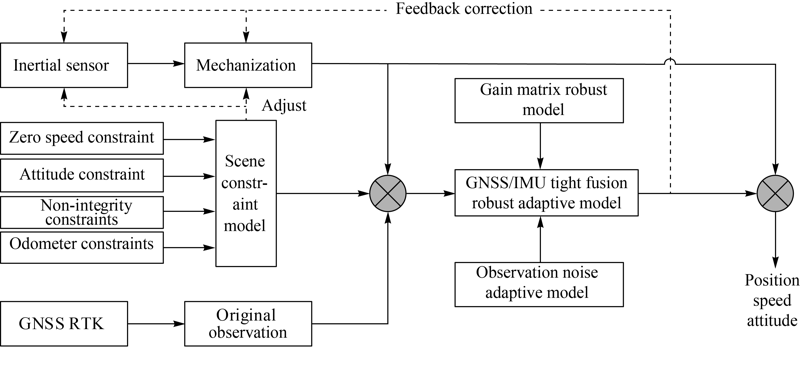

Fig.2
GNSS/MIMU tight assembly module and test platform"
Tab.1
Specifications of the MEMS MIMU and the FOG IMU"
| Specifications | MEMS IMU | Optical fiber IMU |
|---|---|---|
| Acceleration deviation stability/mg | 2 | 0.2 |
| Speed random walk/(ug/sqrt(Hz)) | 120 | 20 |
| Gyro bias stability/(°/h) | 5 | 0.05 |
| Angle random walk (°/sqrt(h)) | 0.4 | 0.005 |
Tab.2
Specifications of the GNSS/FOG INS integrated system"
| Specifications | GNSS/IMU |
|---|---|
| Positioning accuracy | 2cm+1ppm* |
| Attitude measurement accuracy/(°) | 0.01 |
| Heading angle measurement accuracy/(°) | 0.02 |

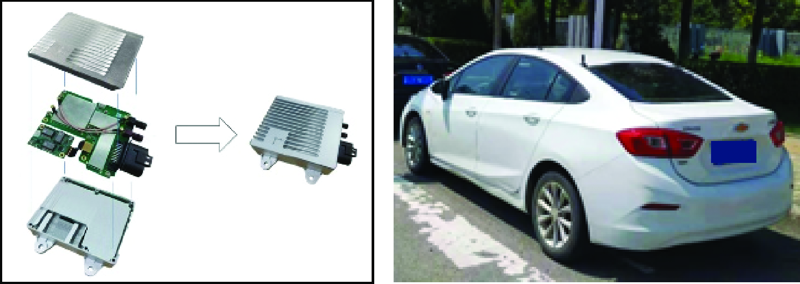
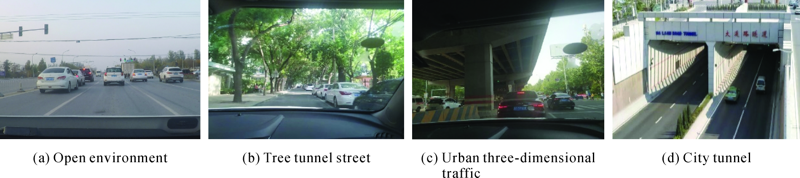
Fig.3
Schematic diagram of the experimental environment"
Tab.3
Improvement of ambiguity fixed rate in the shaded environment(%)"
| Testing scenarios | GNSS | GNSS/MIMU/Feature constraints |
|---|---|---|
| The first time | 79.2 | 89.6 |
| The second time | 79.4 | 88.7 |
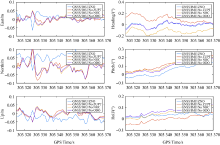
Fig.4
Pose deviation in the open environment"
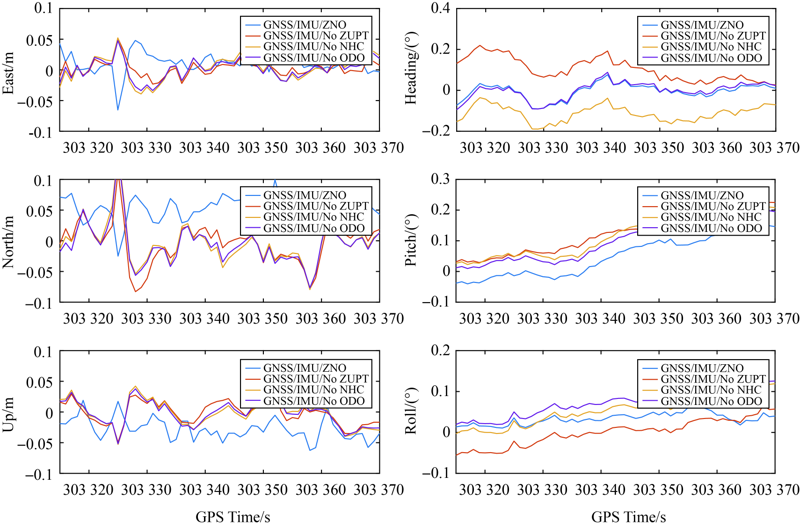
Tab.4
Statistics of the pose deviation in the open environment"
| RMS | position/m | attitude/(°) | ||||
|---|---|---|---|---|---|---|
| E | N | U | Heading | Pitch | Roll | |
| GNSS/MIMU/ZNO | 0.019 | 0.034 | 0.037 | 0.038 | 0.063 | 0.031 |
| GNSS/MIMU/No ZUPT | 0.020 | 0.030 | 0.038 | 0.121 | 0.138 | 0.063 |
| GNSS/MIMU/No NHC | 0.020 | 0.033 | 0.030 | 0.118 | 0.130 | 0.064 |
| GNSS/MIMU/No ODO | 0.019 | 0.031 | 0.019 | 0.042 | 0.117 | 0.077 |
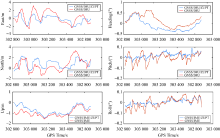
Fig.5
Pose deviation with zero-speed constraint in the shaded environment"
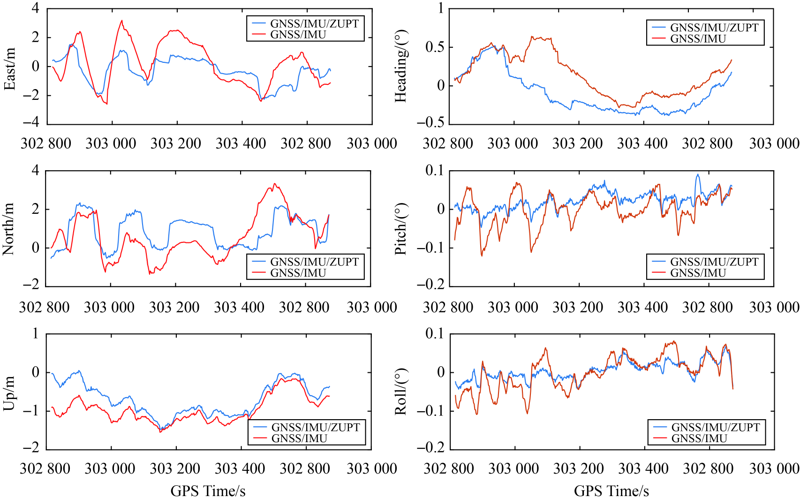
Tab.5
Statistics of the pose deviation with zero-speed constraint in the shaded environment"
| RMS | position/m | attitude/(°) | ||||
|---|---|---|---|---|---|---|
| E | N | U | Heading | Pitch | Roll | |
| Yes | 1.461 | 1.283 | 0.810 | 0.278 | 0.032 | 0.024 |
| No | 1.659 | 1.491 | 1.025 | 0.305 | 0.040 | 0.044 |
Fig.6
Pose deviation of nonholonomic constraints in the shaded environment"
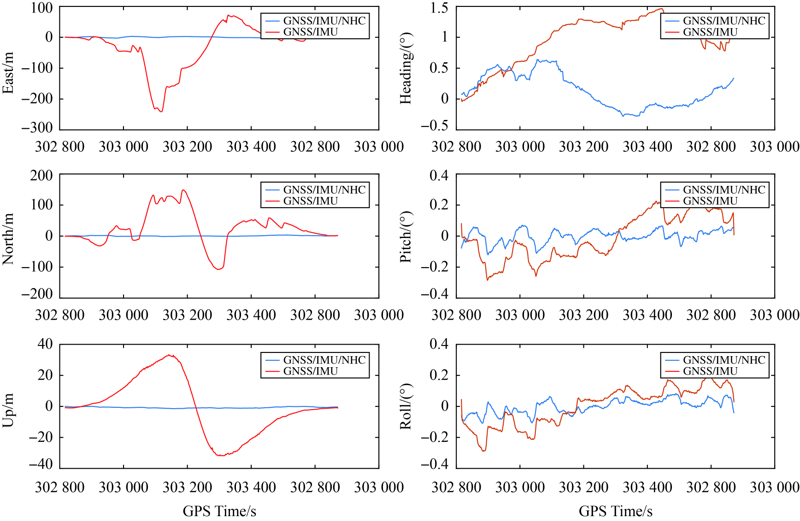
Tab.6
Statistics of the pose deviation with nonholonomic constraints in the shaded environment"
| RMS | position/m | attitude/(°) | ||||
|---|---|---|---|---|---|---|
| E | N | U | Heading | Pitch | Roll | |
| Yes | 1.461 | 1.283 | 0.810 | 0.278 | 0.032 | 0.024 |
| No | 76.465 | 60.974 | 18.011 | 1.029 | 0.146 | 0.123 |
Fig.7
Pose deviation with odometry constraints in the shaded environment"
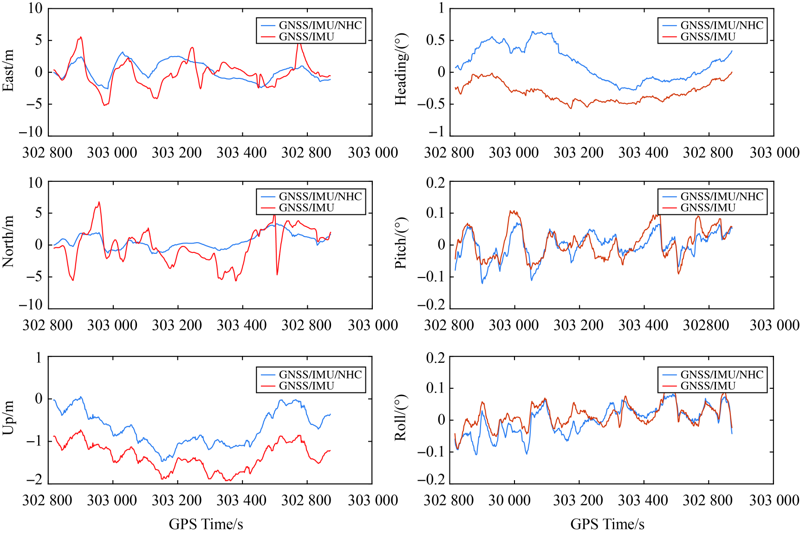
Tab.7
Statistics of the pose deviation with odometry constraints in the shaded environment"
| RMS | position/m | attitude/(°) | ||||
|---|---|---|---|---|---|---|
| E | N | U | Heading | Pitch | Roll | |
| Yes | 1.461 | 1.283 | 0.810 | 0.278 | 0.032 | 0.024 |
| No | 2.056 | 2.707 | 1.397 | 0.349 | 0.047 | 0.049 |
Tab.8
Statistical table of measurement accuracy in the open environment"
| Position/m | Attitude/(°) | Speed/(m/s) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| E | N | U | Roll | Pitch | Head | Ve | Vn | Vu | |
| 1σ | 0.048 | 0.046 | 0.043 | 0.015 | 0.027 | 0.044 | 0.011 | 0.009 | 0.004 |
| Variance | 0.064 | 0.058 | 0.035 | 0.033 | 0.038 | 0.085 | 0.037 | 0.042 | 0.009 |
| RMS | 0.065 | 0.061 | 0.062 | 0.033 | 0.049 | 0.085 | 0.037 | 0.042 | 0.009 |
| Max | 0.133 | 0.131 | 0.221 | 0.136 | 0.16 | 0.259 | 0.142 | 0.154 | 0.039 |
Tab.9
Statistical table of measurement accuracy in the tree-hole environment"
| Position/m | Attitude/(°) | Speed/(m/s) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| E | N | U | Roll | Pitch | Head | Ve | Vn | Vu | |
| 1σ | 0.081 | 0.063 | 0.097 | 0.07 | 0.022 | 0.215 | 0.01 | 0.006 | 0.007 |
| Variance | 0.572 | 0.312 | 0.667 | 0.077 | 0.042 | 0.223 | 0.047 | 0.028 | 0.031 |
| RMS | 0.605 | 0.313 | 0.698 | 0.115 | 0.045 | 0.367 | 0.048 | 0.028 | 0.031 |
| Max | 2.984 | 1.159 | 3.394 | 0.344 | 0.191 | 0.743 | 0.211 | 0.181 | 0.209 |
Tab.10
Statistical table of measurement accuracy in the three-dimensional traffic environment"
| Position/m | Attitude/(°) | Speed/(m/s) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| E | N | U | Roll | Pitch | Head | Ve | Vn | Vu | |
| 1σ | 1.537 | 1.185 | 0.85 | 0.126 | 0.046 | 0.092 | 0.028 | 0.031 | 0.006 |
| Variance | 1.228 | 0.648 | 1.138 | 0.068 | 0.061 | 0.261 | 0.063 | 0.352 | 0.023 |
| RMS | 1.30 | 0.70 | 1.08 | 0.17 | 0.09 | 0.281 | 0.069 | 0.358 | 0.024 |
| Max | 3.078 | 1.677 | 3.718 | 0.378 | 0.309 | 0.839 | 0.241 | 1.623 | 0.148 |
Tab.11
Statistical table of measurement accuracy in the urban tunnel environment"
| Unlock time/s | Statistics | Position/m | Attitude/(°) | Speed/(m/s) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| E | N | U | Roll | Pitch | Heading | Ve | Vn | Vu | ||
| 10 | 1σ | 0.086 | 0.029 | 0.035 | 0.004 | 0.002 | 0.011 | 0.005 | 0.001 | 0.001 |
| Variance | 0.011 | 0.004 | 0.037 | 0.017 | 0.007 | 0.003 | 0.012 | 0.003 | 0.013 | |
| RMS | 0.157 | 0.035 | 0.273 | 0.123 | 0.031 | 0.081 | 0.013 | 0.003 | 0.022 | |
| Max | 0.186 | 0.04 | 0.358 | 0.158 | 0.07 | 0.091 | 0.034 | 0.019 | 0.058 | |
| 30 | 1σ | 0.133 | 0.111 | 0.066 | 0.011 | 0.007 | 0.028 | 0.023 | 0.019 | 0.002 |
| Variance | 0.335 | 1.041 | 0.071 | 0.072 | 0.058 | 0.051 | 0.041 | 0.123 | 0.019 | |
| RMS | 0.448 | 1.237 | 0.213 | 0.129 | 0.099 | 0.075 | 0.062 | 0.154 | 0.02 | |
| Max | 1.665 | 3.228 | 0.358 | 0.182 | 0.225 | 0.121 | 0.146 | 0.411 | 0.058 | |
| 60 | 1σ | 0.3 | 0.516 | 0.118 | 0.022 | 0.016 | 0.045 | 0.051 | 0.083 | 0.003 |
| Variance | 3.342 | 5.019 | 0.087 | 0.111 | 0.065 | 0.066 | 0.196 | 0.327 | 0.017 | |
| RMS | 3.924 | 5.962 | 0.178 | 0.115 | 0.083 | 0.092 | 0.267 | 0.348 | 0.017 | |
| Max | 11.296 | 14.866 | 0.455 | 0.23 | 0.225 | 0.35 | 0.834 | 1.035 | 0.058 | |
| [1] |
YANG Yuanxi, XU Yangyin, LI Jinlong, et al. Progress and performance evaluation of BeiDou global navigation satellite system: Data analysis based on BDS-3 demonstration system[J]. Science China Earth Sciences, 2018,61(5):614-624.
doi: 10.1007/s11430-017-9186-9 |
| [2] |
HAN Houzeng, WANG Jian, WANG Jinling, et al. Performance analysis on carrier phase-based tightly-coupled GPS/BDS/INS integration in GNSS degraded and denied environments[J]. Sensors, 2015,15(4):8685-8711.
doi: 10.3390/s150408685 |
| [3] |
YANG Ling, LI Yong, WU Youlong, et al. An enhanced MEMS-INS/GNSS integrated system with fault detection and exclusion capability for land vehicle navigation in urban areas[J]. GPS Solutions, 2014,18(4):593-603.
doi: 10.1007/s10291-013-0357-1 |
| [4] | YANG Yuanxi. Concepts of comprehensive PNT and related key technologies[J]. Acta Geodaetica et Cartographica Sinica, 2016,45(5):505-510.DOI: 10.11947/j.AGCS.2016.20160127. |
| [5] | ZHANG Xiaohong, LI Xingxing, LI Pan. Review of GNSS PPP and its application[J]. Acta Geodaetica et Cartographica Siniea, 2017,46(10):1399-1407. DOI: 10.11947/j.AGCS.2017.20170327. |
| [6] | LI Tuan, ZHANG Hongping, NIU Xiaoji, et al. Performance analysis of tightly coupled RTK/INS algorithm in case of insufficient number of satellites[J]. Geomatics and Information Science of Wuhan University, 2018,43(3):478-484. |
| [7] | TIEN Y C, CHEN Y L, CHIANG K W. Adaptive strategy-based tightly-coupled INS/GNSS integration system aided by odometer and barometer[J]. International Archives of the Photogrammetry, Remote Sensing Spatial Information Sciences, 2019,42(2/W13):881-888. |
| [8] | JIANG Chen, ZHANG Shubi, CAO Yizhi, et al. A robust fault detection algorithm for the GNSS/INS Integrated navigation systems[J]. Journal of Geodesy and Geoinformation Science, 2020,3(1):12-24. |
| [9] | GU Mingze, HU Zhigang, ZHAO Qile, et al. Method of cycle slip detection based in GNSS/INS Tightly coupled mode[J]. Journal of Geomatics Science and Technology, 2019,36(4):335-339. |
| [10] | WU Youlong, WANG Xiaoming, YANG Ling, et al. Autonomous integrity monitoring of tightly coupled GNSS/INS navigation system[J]. Acta Geodaetica et Cartographica Sinica, 2014,43(8):786-795. |
| [11] | HAN Houzeng, WANG Jian, LI Zengke. Inertial aided kinematic GPS cycle slip detection and correction for GPS/INS tightly coupled system[J]. Acta Geodaetica et Cartographica Sinica, 2015,44(8):848-857. DOI: 10.11947/j.AGCS.2015.20140350. |
| [12] | FU Qiangwen, QIN Yongyuan, LI Sihai. ZUPT method for vehicular SINS aided by velocity constraint[J]. Systems Engineering and Electronics, 2013,35(8):1723-1728. |
| [13] | WANG Libing, ZHOU Jun, LIU Pengfei, et al. Vehicle integrated navigation algorithm aided by motion constraints[J]. Journal of Ordnance Equipment Engineering, 2019,40(2):120-124. |
| [14] | FU Qiangwen, QIN Yongyuan, LI Sihai, et al. Inertial navigation algorithm aided by motion constraints of vehicle[J]. Journal of Chinese Inertial Technology, 2012,20(6):640-643. |
| [15] |
LI Zengke, WANG Jian, LI Binghao, et al. GPS/INS/Odometer integrated system using fuzzy neural network for land vehicle navigation applications[J]. The Journal of Navigation, 2014,67(6):967-983.
doi: 10.1017/S0373463314000307 |
| [16] |
AFTATAH M, LAHRECH A, ABOUNADA A, et al. GPS/INS/Odometer data fusion for land vehicle localization in GPS denied environment[J]. Modern Applied Science, 2016,11(1):62.
doi: 10.5539/mas.v11n1p62 |
| [17] | WANG Yankun. Research on MIMU assisted dual antenna GPS integrated attitude determination system[D]. Nanjing: Nanjing University of Science andTechnology, 2015. |
| [18] | GAN Yu, SUI Lifen, LIU Changjian, et al. Instantaneous attitude determination based on original multi-antenna observations using adaptively robust Kalman filtering[J]. Acta Geodaetica et Cartographica Sinica, 2015,44(9):945-951. DOI: 10.11947/j.AGCS.2015.20140492. |
| [19] | TANG Weiming, LI Di, CHI Fengming. Research on single epoch orientation algorithm of BeiDou navigation satellite system[J]. Geomatics and Information Science of Wuhan University, 2013,38(9):1014-1017. |
| [20] | YAO Zhuo. Research on the method based on double antenna in vehicular GNSS/INS integration[D]. Wuhan: Wuhan University, 2017. |
| [21] | ZHAO Zhengyang, TANG Xinhua, CHEN Xiyuan. Design of low-cost tightly-coupled GNSS/SINS vehicle navigation system[J]. Measurement & Control Technology, 2018,37(9):92-95. |
| [22] |
ZHANG Xiaohong, ZHU Feng, TAO Xianlu, et al. New optimal smoothing scheme for improving relative and absolute accuracy of tightly coupled GNSS/SINS integration[J]. GPS Solutions, 2017,21(3):861-872.
doi: 10.1007/s10291-017-0601-1 |
| [23] | ZHOU Jiangwen, HUANG Youcai, YANG Yuanxi, et al. Robust least squares method[M]. Wuhan: Huazhong University of Science and Technology Press, 1997. |
| [24] | LI Bofeng, ZHANG Zhetao. Several kinematic data processing methods for time-correlated observations[J]. Acta Geodaetica et Cartographica Sinica, 2018,47(12):1563-1570. DOI: 10.11947/j.AGCS.2018.20180192. |
| [25] |
HAN Houzeng, WANG Jian, LIU Fei, et al. An emergency seamless positioning technique based on ad hoc UWB networking using robust EKF[J]. Sensors, 2019,19(14):3135.
doi: 10.3390/s19143135 |
| [26] | YAN Gongmin. Research on vehicle autonomous positioning and orientation system[D]. Xi’an: Northwestern Polytechnical University, 2006. |
| [27] | LIU Zhijian, LIU Yi. Algorithm of a real-time attitude system using non-dedicated GPS receivers[J]. Acta Geodaetica et Cartographica Sinica, 2005,34(3):213-217. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||