
Journal of Geodesy and Geoinformation Science ›› 2022, Vol. 5 ›› Issue (3): 93-110.doi: 10.11947/j.JGGS.2022.0310
Chen DENG1( ),Xiong YOU1(),Weiwei ZHANG1,Meixia ZHI2,Diao LIN1,Wang XU1
),Xiong YOU1(),Weiwei ZHANG1,Meixia ZHI2,Diao LIN1,Wang XU1
Received:2022-01-10
Accepted:2022-07-25
Online:2022-09-20
Published:2022-11-17
Contact:
Xiong YOU
E-mail:906739553@qq.com;youarexiong@163.com
About author:Chen DENG(1990—), male,PhD candidate,majors in virtual reality and geographical environment simulation, augmented reality and location based service.E-mail: Chen DENG,Xiong YOU,Weiwei ZHANG,Meixia ZHI,Diao LIN,Wang XU. A Vision-aided Localization and Geo-registration Method for Urban ARGIS Based on 2D Maps[J]. Journal of Geodesy and Geoinformation Science, 2022, 5(3): 93-110.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig.1
Comparison of different geo-registration effects of outdoor ARGIS"


Fig.2
Effects of vision-aided pose optimization and geo-registration accuracy improvement"
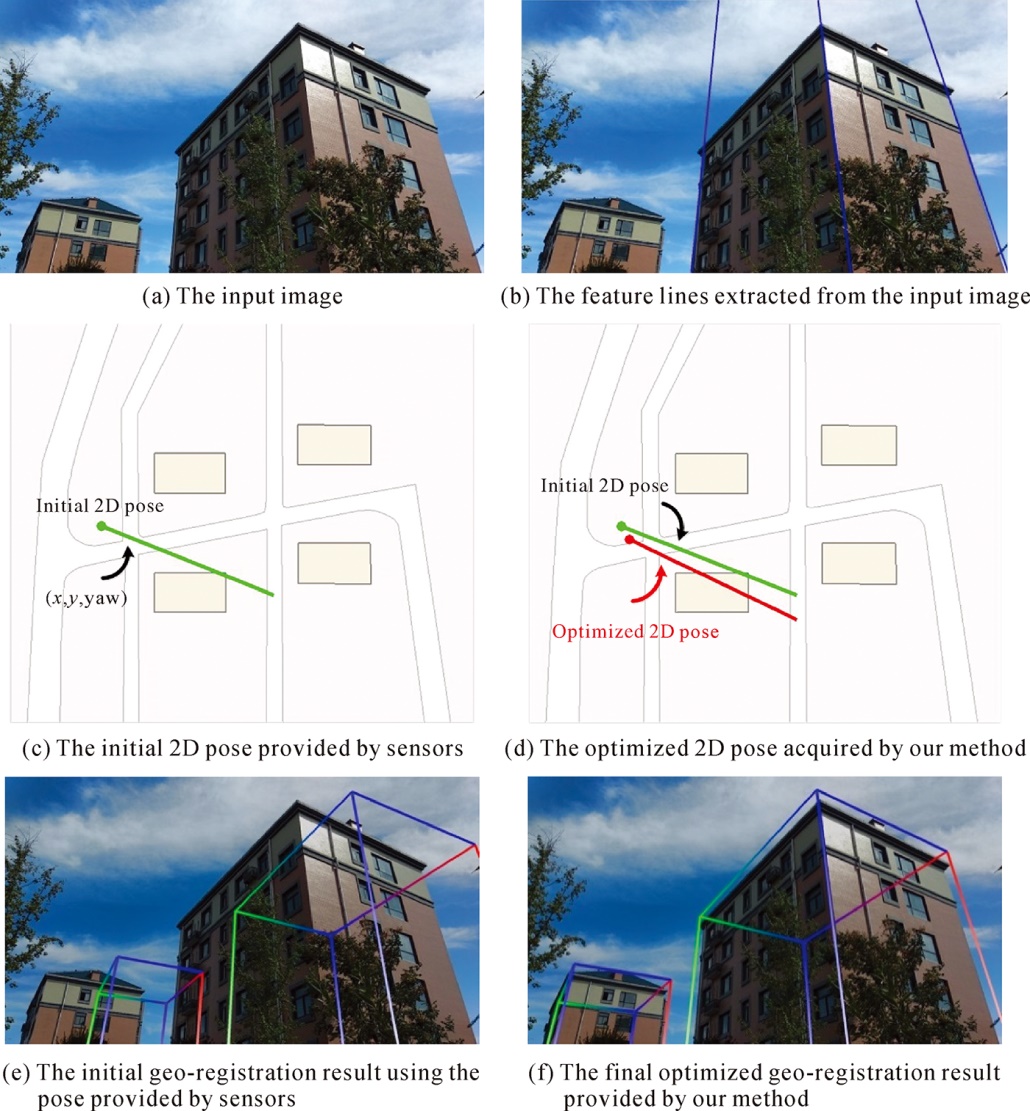

Fig.3
The Vision-Aided Localization and Geo-Registration (VALGR) framework"


Fig.4
Image semantic segmentation and building area extraction"
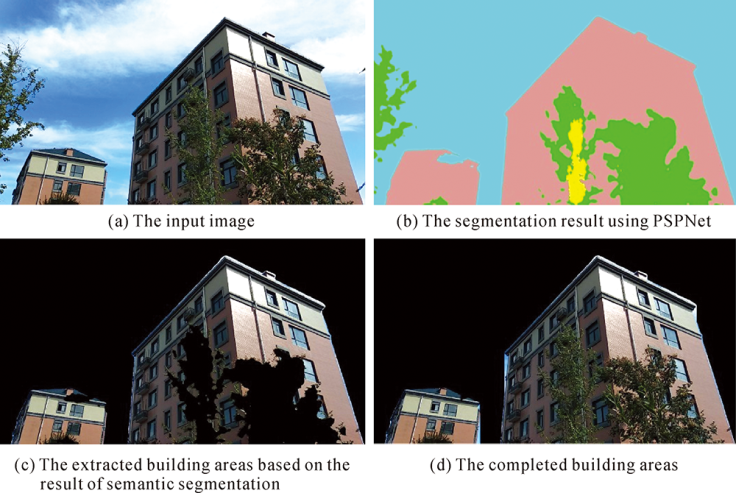

Fig.5
Line segments extraction from building facades and vanishing points estimation"
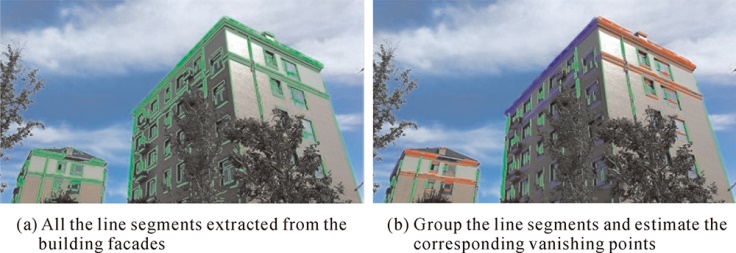
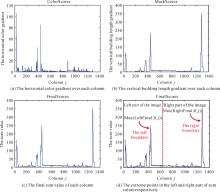
Fig.6
Estimation of the boundary of vertical edges corresponding to the left and right corner of the building"
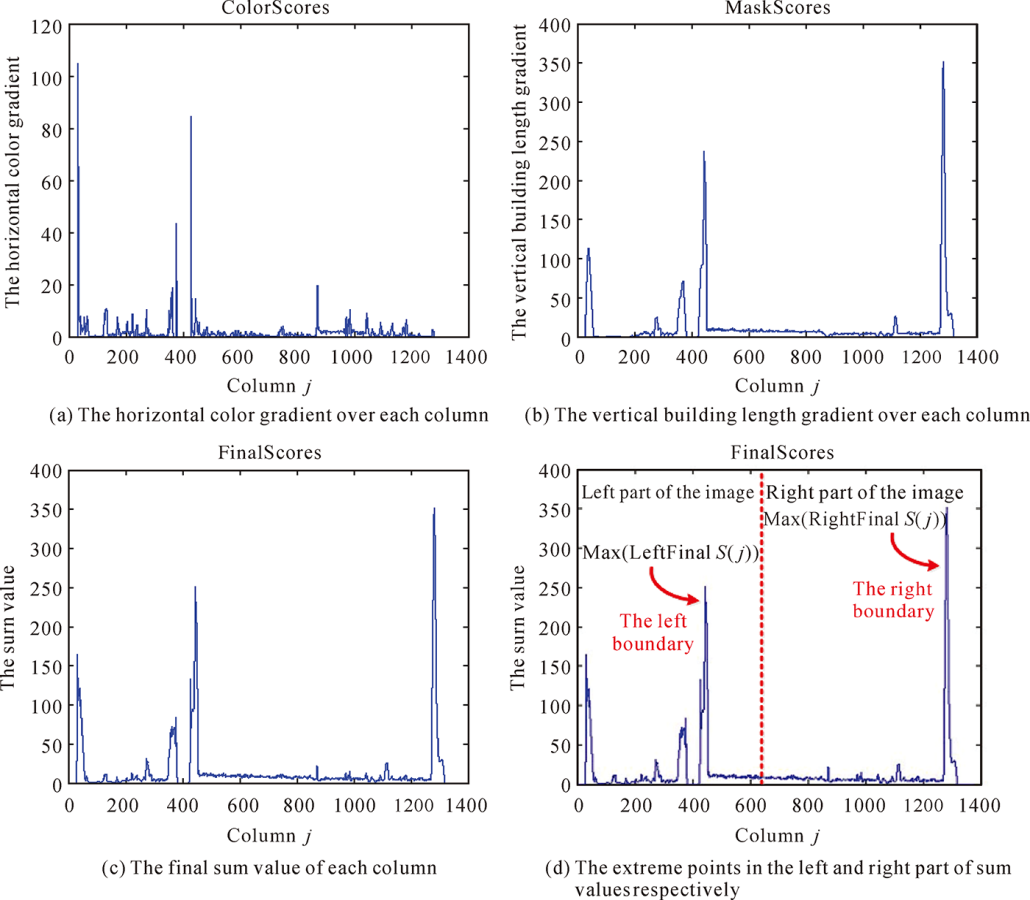
Fig.7
Recognition and extraction of the left, the middle and right corner vertical edge of the building"
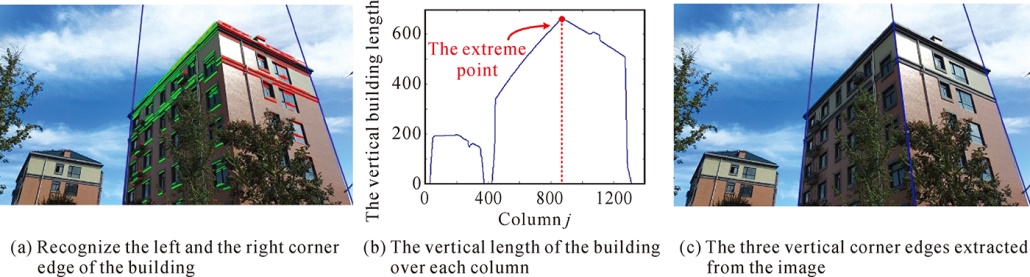

Fig.8
Horizontal distribution of the three vertical corner edges and their corresponding corners on the 2D map"


Fig.9
Initial 2D camera pose and the 2D pose hypotheses"
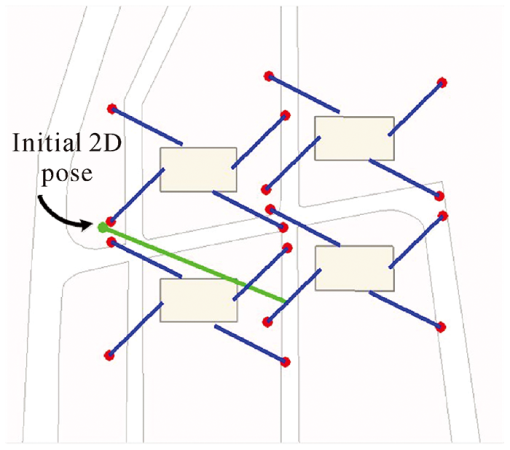
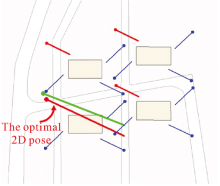
Fig.10
Screening to get the optimal 2D pose solution"
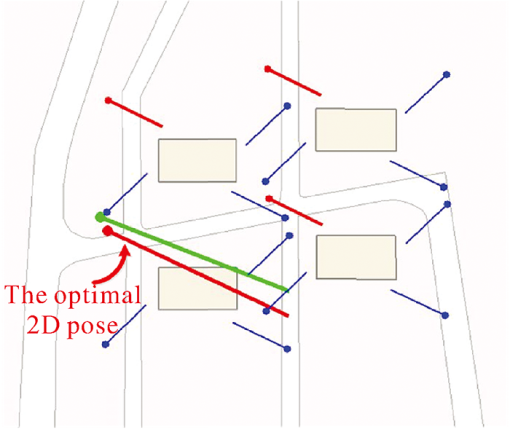

Fig.11
The test scenarios and results of our experiments: for each triplet image in the vertical direction. (The top row demonstrates the three corner edges automatically extracted from the original images (after the rolling angle correction); The middle row demonstrates the semantic segmentation results of original images; And the third row demonstrates the sensor’s initial 2D pose and the optimized 2D pose.)"

Tab.1
The 3DOF translation accuracy of our method compared with the initial position acquired by sensorsm"
| 3DOF Translation Accuracy | X(E) | Y(N) | Z(U) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Max | Min | Average | Max | Min | Average | Max | Min | Average | |||
| Initial translation errors | 4.286 | 0.744 | 2.307 | 6.731 | 0.755 | 3.243 | 8.906 | 0.741 | 3.686 | ||
| The corrected translation errors | 1.590 | 0.075 | 0.630 | 1.227 | 0.042 | 0.550 | — | — | — | ||
Tab.2
The 3DOF attitude accuracy of our method compared with the initial attitude acquired by sensors(°)"
| 3DOF Attitude Accuracy | Pitch | Roll | Yaw | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Max | Min | Average | Max | Min | Average | Max | Min | Average | |||
| Initial attitude errors | 1.0533 | 0.0446 | 0.4345 | 2.406 | 0.4490 | 1.4528 | 7.0644 | 1.5673 | 4.4935 | ||
| The corrected attitude errors | — | — | — | — | — | — | 1.6929 | 0.0949 | 0.5673 | ||
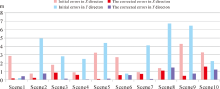
Fig.12
Improvement of horizontal translation accuracy of each scene"
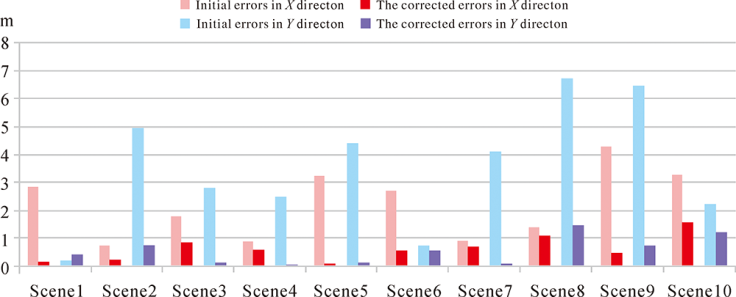
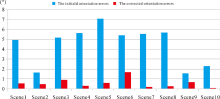
Fig.13
Improvement of yaw angle accuracy for each set of scenes"
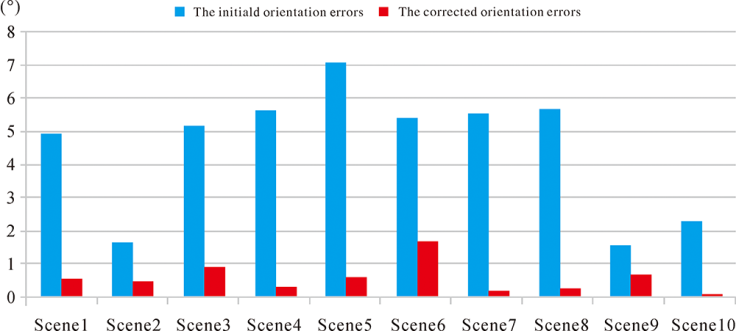

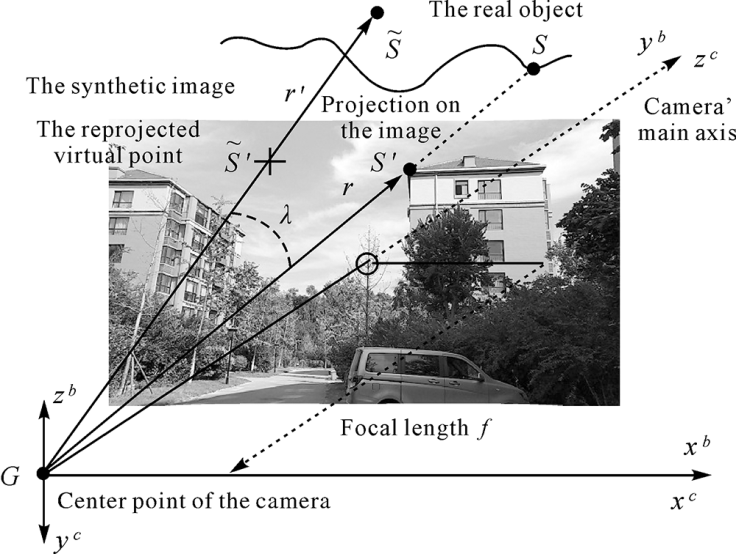
Fig.14
Schematic diagram for quantitative registration accuracy evaluation"
Tab.3
The geo-registration accuracy of our method compared with the initial result acquired by sensors"
| Geo-registration schemes and their accuracy | Maximum errors | Minimum errors | Average errors | |||||
|---|---|---|---|---|---|---|---|---|
| /(°) | /mrad | /(°) | /mrad | /(°) | mrad | |||
| Initial registration errors | 10.7557 | 187.72 | 2.7744 | 48.42 | 7.1819 | 125.34 | ||
| The corrected registration errors | 2.0491 | 35.76 | 0.3335 | 5.82 | 1.1168 | 19.49 | ||
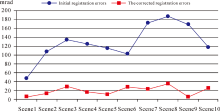
Fig.15
The geo-registration accuracy before and after optimization for each scene"


Fig.16
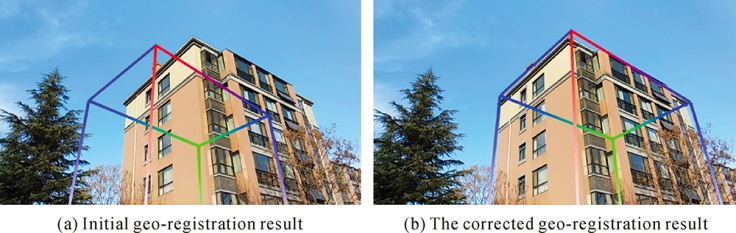
Geo-registration results in scene 2 before and after optimization"


Fig.17
Geo-registration results in scene 4 before and after optimization"
| [1] | DU Qingyun, LIU Tao. Design and implementation of a prototype outdoor augmented reality GIS[J]. Geomatics and Information Science of Wuhan University, 2007, 32(11): 1046-1049. |
| [2] | SUN Min, CHEN Xiuwan, ZHANG Feizhou, et al. Augment reality geographical information system[J]. Acta Scientiarum Naturalium Universitatis Pekinensis, 2004, 40(6): 906-913. |
| [3] | LIU Jingnan, GAO Kefu. Augmented reality and its applications for navigation and location based service[J]. Geospatial Information, 2013, 11(2): 1-6, 14. |
| [4] |
LUO Bin, WANG Yongtian, SHEN Hao, et al. Overview of hybrid tracking in augmented reality[J]. Acta Automatica Sinica, 2013, 39(8): 1185-1201.
doi: 10.3724/SP.J.1004.2013.01185 |
| [5] |
YOU Xiong, ZHANG Weiwei, MA Meng, et al. Survey on urban warfare augmented reality[J]. ISPRS International Journal of Geo-Information, 2018, 7(2): 46.
doi: 10.3390/ijgi7020046 |
| [6] | LIU Haomin, ZHANG Guofeng, BAO Hujun. A survey of monocular simultaneous localization and mapping[J]. Journal of Computer-Aided Design & Computer Graphics, 2016, 28(6): 855-868. |
| [7] | QU Yi, LI Aiguang, XU Wang, et al. Outdoor ARGIS registration techniques based on position-posture sensor[J]. Journal of Geomatics Science and Technology, 2017, 34(1): 106-110. |
| [8] | QU Yi, LI Aiguang, XU Wang, et al. Research on multi sensor hybrid tracking registration for ARGIS[J]. Geomatics & Spatial Information Technology, 2017, 40(3): 114-117, 121. |
| [9] | WANG Jun. Application research on outdoor augmented reality GIS[D]. Chongqing: Southwest University, 2014. |
| [10] | SUN Min, LIU Lei, HUANG Wei, et al. Interactive registration for augmented reality GIS[C]// Proceedings of 2012 International Conference on Computer Vision in Remote Sensing. Xiamen, China: IEEE, 2012: 246-251. |
| [11] |
HUANG Wei, SUN Min, LI Songnian. A 3D GIS-based interactive registration mechanism for outdoor augmented reality system[J]. Expert Systems with Applications, 2016, 55(8): 48-58.
doi: 10.1016/j.eswa.2016.01.037 |
| [12] | VENTURA J, HÖLLERER T. Wide-area scene mapping for mobile visual tracking[C]// Proceedings of 2012 IEEE International Symposium on Mixed and Augmented Reality. Atlanta, GA: IEEE, 2012: 3-12. |
| [13] | MIDDELBERG S, SATTLER T, UNTZELMANN O, et al. Scalable 6-DOF localization on mobile devices[C]// Proceedings of the 13th European conference on computer vision. Zurich, Switzerland: Springer, 2014: 268-283. |
| [14] | ARTH C, VENTURA J, SCHMALSTIEG D. Geospatial management and utilization of large-scale urban visual reconstructions[C]// Proceedings of the 4th International Conference on Computing for Geospatial Research and Application. San Jose, CA: IEEE, 2013: 64-69. |
| [15] | DUAN Liya. Study on key technology of wide area localization and registration for mobile augmented reality systems[D]. Wuhan: Huazhong University of Science and Technology, 2013. |
| [16] |
VENTURA J, ARTH C, REITMAYR G, et al. Global localization from monocular SLAM on a mobile phone[J]. IEEE Transactions on Visualization and Computer Graphics, 2014, 20(4): 531-539.
doi: 10.1109/TVCG.2014.27 |
| [17] | LIU Haomin, ZHANG Guofeng, BAO Hujun. Robust keyframe-based monocular SLAM for augmented reality[C]// Proceedings of 2016 IEEE International Symposium on Mixed and Augmented Reality. Merida, Mexico: IEEE, 2016: 1-10. |
| [18] | LI Peiliang, QIN Tong, HU Botao, et al. Monocular visual-inertial state estimation for mobile augmented reality[C]// Proceedings of 2017 IEEE International Symposium on Mixed and Augmented Reality. Nantes, France: IEEE, 2017: 11-21. |
| [19] | MENOZZI A, CLIPP B, WENGER E, et al. Development of vision-aided navigation for a wearable outdoor augmented reality system[C]// Proceedings of 2014 IEEE/ION Position, Location and Navigation Symposium-PLANS 2014. Monterey, CA: IEEE, 2014: 460-472. |
| [20] | GANS E, ROBERTS D, BENNETT M, et al. Augmented reality technology for day/night situational awareness for the dismounted soldier[C]// Proceedings of Volume 9470, Display Technologies and Applications for Defense, Security, and Avionics IX; and Head- and Helmet-Mounted Displays XX. Baltimore, Maryland, United States: SPIE, 2015: 01-11. |
| [21] | CHAM T J, CIPTADI A, TAN W C, et al. Estimating camera pose from a single urban ground-view omnidirectional image and a 2D building outline map[C]// Proceedings of 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Francisco, CA: IEEE, 2010: 366-373. |
| [22] | CHU Hang, GALLAGHER A, CHEN T. GPS refinement and camera orientation estimation from a single image and a 2D map[C]// Proceedings of 2014 IEEE Conference on Computer Vision and Pattern Recognition Workshops. Columbus, OH: IEEE, 2014: 171-178. |
| [23] | GALLAGHER A C. Using vanishing points to correct camera rotation in images[C]// Proceedings of the 2nd Canadian Conference on Computer and Robot Vision. Victoria, BC, Canada: IEEE, 2005: 460-467. |
| [24] |
ZHANG Zhengyou. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334.
doi: 10.1109/34.888718 |
| [25] |
LOBO J, DIAS J. Relative pose calibration between visual and inertial sensors[J]. The International Journal of Robotics Research, 2007, 26(6): 561-575.
doi: 10.1177/0278364907079276 |
| [26] | ZHAO Hengshuang, SHI Jianping, QI Xiaojuan, et al. Pyramid scene parsing network[C]// Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, HI: IEEE, 2017: 2881-2890. |
| [27] |
VON GIOI R G, JAKUBOWICZ J, MOREL J M, et al. LSD: a fast line segment detector with a false detection control[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(4): 722-732.
doi: 10.1109/TPAMI.2008.300 pmid: 20224126 |
| [28] | ZHONG Baojiang, XU Dongsheng, YANG Jiwen. Vertical corner line detection on buildings in quasi-Manhattan world[C]// Proceedings of 2013 IEEE International Conference on Image Processing. Melbourne, VIC, Australia: IEEE, 2013: 3064-3068. |
| [29] | TARDIF J P. Non-iterative approach for fast and accurate vanishing point detection[C]// Proceedings of the 12th International Conference on Computer Vision. Kyoto, Japan: IEEE, 2009: 1250-1257. |
| [30] |
LEPETIT V, MORENO-NOGUER F, FUA P. EPnP: an accurate O(n) solution to the PnP problem[J]. International Journal of Computer Vision, 2009, 81(2): 155-166.
doi: 10.1007/s11263-008-0152-6 |
| [31] | CHULLIAT A, MACMILLAN S, ALKEN P, et al. The US/UK world magnetic model for 2015—2020: technical report[R]. Boulder, CO: NOAA, 2015. |
| [32] |
ARTH C, PIRCHHEIM C, VENTURA J, et al. Instant outdoor localization and SLAM initialization from 2.5D maps[J]. IEEE Transactions on Visualization and Computer Graphics, 2015, 21(11): 1309-1318.
doi: 10.1109/TVCG.2015.2459772 |
| [33] | ARTH C, PIRCHHEIM C, VENTURA J, et al. Global 6DOF pose estimation from untextured 2D city models[J]. Computer Science, 2015, 25(1): 1-8. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||