
Journal of Geodesy and Geoinformation Science ›› 2021, Vol. 4 ›› Issue (4): 11-33.doi: 10.11947/j.JGGS.2021.0402
Previous Articles Next Articles
Chenyang ZHANG1,2( ),Teng HUANG2,Yueqian SHEN2()
),Teng HUANG2,Yueqian SHEN2()
Received:2021-02-28
Accepted:2021-08-30
Online:2021-12-20
Published:2021-12-30
Contact:
Yueqian SHEN
E-mail:zcynj@hhu.ed.cn;y.shen_lidar@hhu.edu.cn
About author:Chenyang ZHANG(1991—), male, PhD, engaged in photogrammetry and computer vision.E-mail: Supported by:Chenyang ZHANG,Teng HUANG,Yueqian SHEN. A Review of RGB-D Camera Calibration Methods[J]. Journal of Geodesy and Geoinformation Science, 2021, 4(4): 11-33.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Tab.1
The retrieval results of keywords in main scholarly databases"
| Keyword | IEEE Xplore | Science Direct | Springer Link |
|---|---|---|---|
| “RGB-D camera calibration” | 13 | 8 | 19 |
| “RGB-D sensor calibration” | 5 | 8 | 18 |
| “RGB-D camera” | 273 | 164 | 58 |
| “RGB-D sensor” | 132 | 165 | 35 |
| “ToF camera” | 544 | 100 | 4864 |
| “Kinect” | 1279 | 231 | 488 |

Fig.1
RGB-D cameras"

Tab.2
Technical parameters of RGB-D camera"
| Sensor | Field of angle(H×V) | Size of Color image/pixel | Frame rate of RGB image/fps | Size of Depth image/pixel | Range of Depth/m | Frame rate of Depth image/fps | Technology |
|---|---|---|---|---|---|---|---|
| Kinect-1 | 57.5°×43.5° | 640×480 | 30 | 640×480 | 0.8~4.0 | 30 | SL |
| Kinect-2 | 70°×60° | 1920×1080 | 30 | 512×424 | 0.5~4.2 | 30 | ToF |
| XtionProLive | 58°×45° | 1280×1024 | 30 | 640×480 | 0.8~3.5 | 30 | SL |
| Real Sense | 59°×46° | 1920×1080 | 30/60 | 640×480 | 0.8~1.2 | 30/60 | SL |
| Structure Sensor | 59°×45° | 640×480 | 30 | 640×480 | 0.4~3.5 | 30 | SL |
| Camrine1.08 | 57.5°×45° | 640×480 | 30 | 640×480 | 0.8~3.5 | 30 | SL |
| Camrine1.09 | 57.5°×45° | 640×480 | 30 | 640×480 | 0.35~1.4 | 30 | SL |
| Azure Kinect | 75°×65° | Multiple | 30 | Multiple | 0.5~5.46 | 30 | ToF |
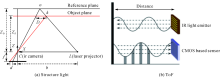
Fig.2
The principle of depth measurement"
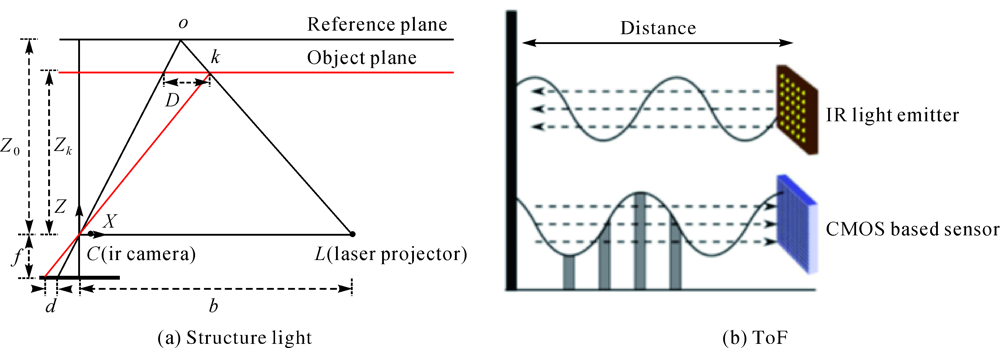

Fig.3
Different calibration objects"
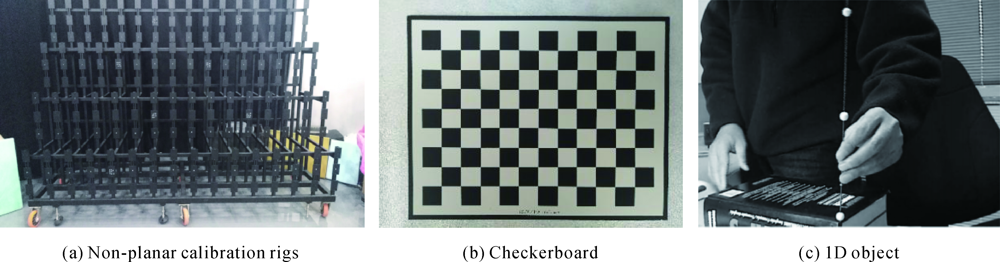
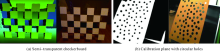
Fig.4
The proposed two calibration objects"
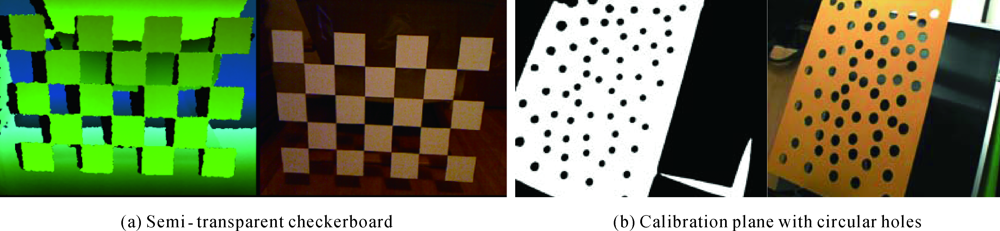

Fig.5
Calibration based on sphere"


Fig.6
Infrared images obtained by the RGB-D cameras"


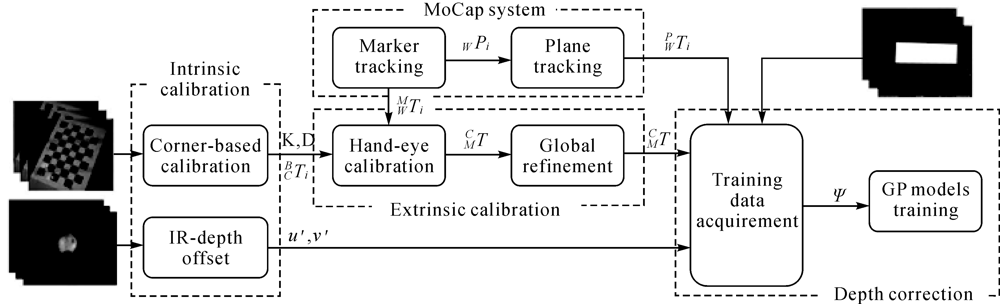
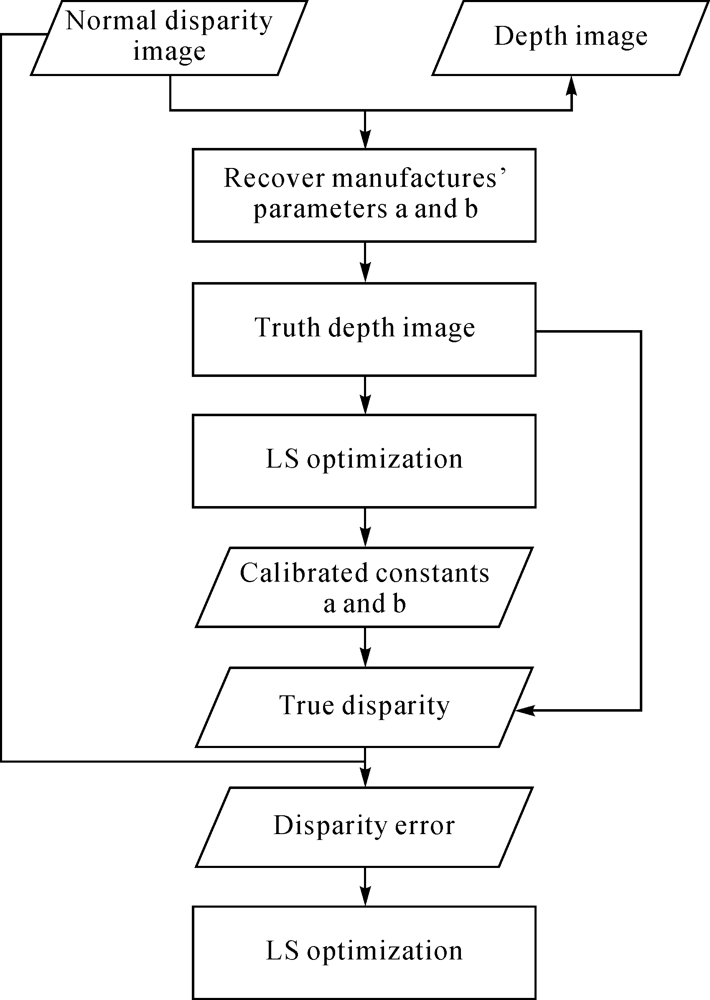
Fig.7
Flow chart of the calibration method"
Tab.4
Calibration method of RGB-D camera based on structure light"
| Model | Year | Input | Calibration target | Open source | Applicable camera |
|---|---|---|---|---|---|
| Chen | 2019 | C,D | Checkerboard+MoCap | N | SL |
| Yamazoe | 2018 | I | Checkerboard | N | SL |
| Walid D | 2017 | I,C,D,Z | Checkerboard | N | SL |
| Quenzel | 2017 | C,Z | SLAM | N | SL/TOF |
| CiccoM | 2015 | Z | No | N | SL/TOF |
| Ferstl | 2015 | Z | Custom | N | SL/TOF |
| Gui | 2014 | Z | 3D Calibration Field | N | SL/TOF |
| Jin | 2014 | Z,C,D | Cubic | N | SL |
| Canessa | 2014 | Z,I,C | Checkerboard | N | SL |
| Guo | 2014 | I,C | Checkerboard | N | SL |
| Teichman | 2013 | C,Z | SLAM | N | SL/TOF |
| Raposo | 2013 | Z,C | Checkerboard | Y | SL |
| Nguyen | 2012 | Z | No | N | SL/TOL |
| Kho | 2012 | C,D,Z,I | Checkerboard | N | SL |
| Daniel | 2012 | D C | Checkerboard | Y | SL |
| Daniel | 2011 | Z,C | Checkerboard | N | SL |
| Zhang | 2011 | Z C | Checkerboard | Y | SL |
| Smisek | 2011 | I,C,Z | Checkerboard | Y | SL |
Fig.8
The cubes with known size"
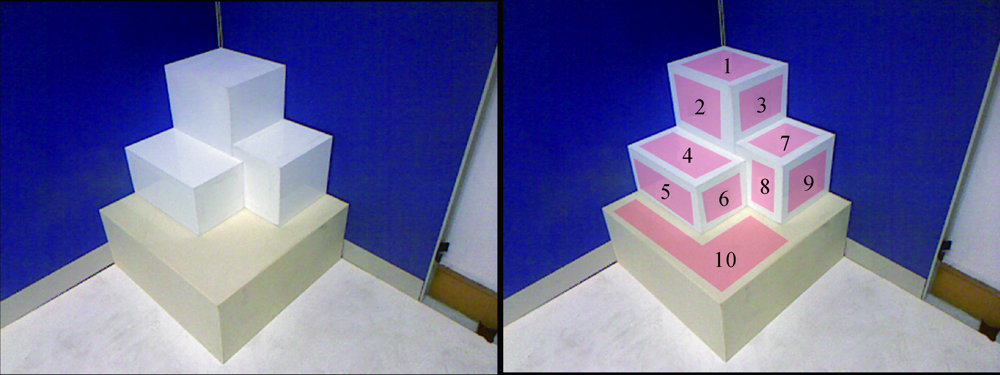
Fig.9
The flow chart of calibration model"
Tab.5
Calibration model of Camera based on time of flight"
| Model | Year | Input | Reference depth acquisition | Open source |
|---|---|---|---|---|
| Che | 2018 | Z | 3D calibration field | N |
| Lachat E | 2015 | Z | Checkerboard | N |
| JiyoungJ | 2015 | Z | Self Calibration | N |
| Chow | 2013 | Z,C | Self Calibration | N |
| Belhedi | 2012 | Z | Self Calibration | N |
| Shim H | 2012 | C,Z,I | CCD Camera | N |
| Linder | 2010 | I,C | Self Calibration | N |
| Schiller | 2008 | Z | Self Calibration | N |
| YoungM | 2008 | — | Self Calibration | N |
| Fuchs | 2008 | Z | Robot Arm | N |
| Linder | 2007 | Z C | CCD Camera | N |
| Linder | 2006 | Z | — | N |

Fig.10
Image of checkerboard was captured at a far distance"

Fig.11
The array of multiple RGB-D cameras"
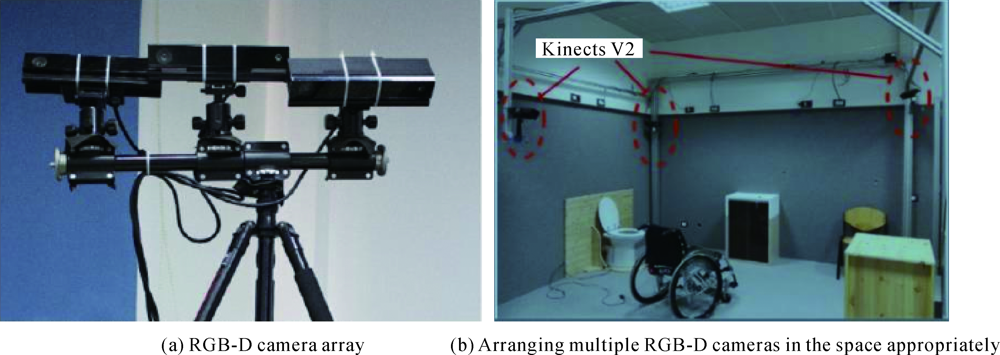
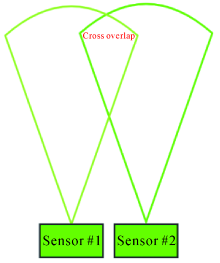
Fig.12
The cross-region of RGB-D cameras"
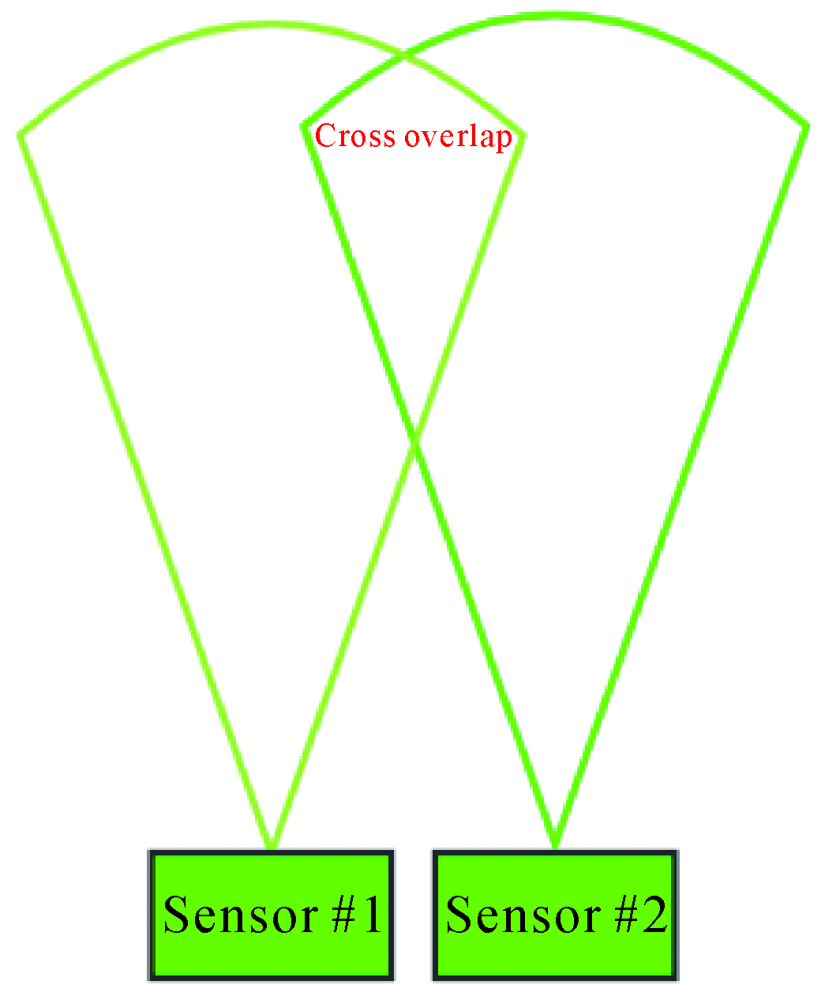

Fig.13
The RGB-D camera calibration based on human skeleton"
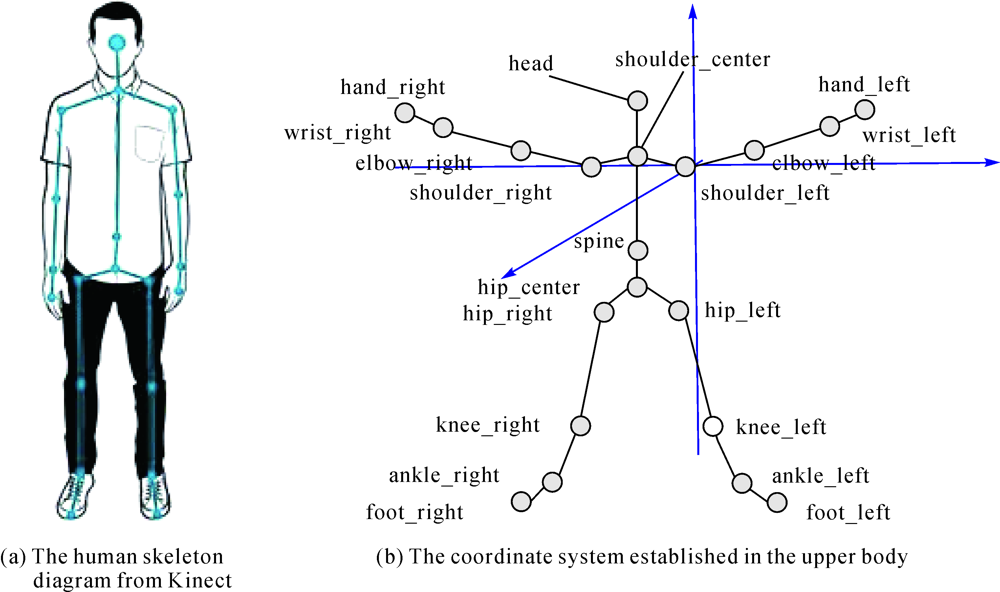

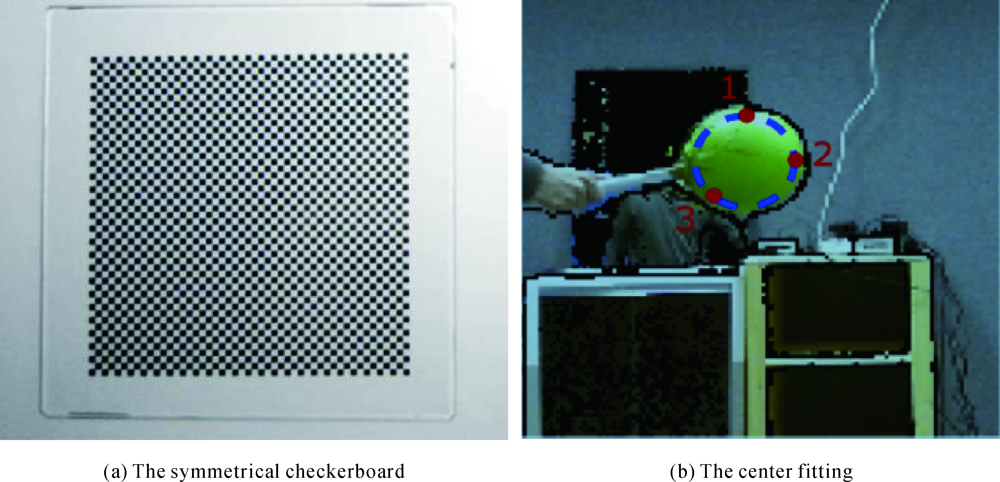
Fig.14
The extrinsic parameters calibration of RGB-D cameras based on checkerboard and fitting sphere"
| [1] | DI Kaichang, WAN Wenhui, ZHAO Hongying, et al. Progress and applications of visual SLAM[J]. Journal of Geodesy and Geoinformation Science, 2019, 2(2):38-49. |
| [2] | OLIVER A, KANG S, WÜNSCHE B C, et al. Using the kinect as a navigation sensor for mobile robotics[C]// Proceedings of the 27th Conference on Image and Vision Computing New Zealand. New York, NY: ACM, 2012: 509-514. |
| [3] |
HENRY P, KRAININ M, HERBST E, et al. RGB-D mapping: Using Kinect-style depth cameras for dense 3D modeling of indoor environments[J]. International Journal of Robotics Research, 2012, 31(5):647-663.
doi: 10.1177/0278364911434148 |
| [4] |
HAN Jungong, SHAO Ling, XU Dong, et al. Enhanced computer vision with microsoft kinect sensor: a review[J]. IEEE Transactions on Cybernetics, 2013, 43(5):1318-1334.
doi: 10.1109/TCYB.2013.2265378 pmid: 23807480 |
| [5] | ALNOWAMI M, ALNWAIMI B, TAHAVORI F, et al. A quantitative assessment of using the Kinect for Xbox 360 for respiratory surface motion tracking[C]// Proceedings of SPIE 8316, Medical Imaging 2012: Image-Guided Procedures, Robotic Interventions, and Modeling. San Diego, California, United States: SPIE, 2012: 571-580. |
| [6] | GUEVARA D C, VIETRI G, PRABAKAR M, et al. Robotic exoskeleton system controlled by kinect and haptic sensors for physical therapy[C]// Proceedings of the 2013 29th Southern Biomedical Engineering Conference. Miami, FL, USA: IEEE, 2013:71-72. |
| [7] | RICHARDS-RISSETTO H, REMONDINO F, AGUGIARO G, et al. Kinect and 3D GIS in archaeology[C]// Proceedings of 2012 18th International Conference on Virtual Systems and Multimedia. Milan, Italy: IEEE, 2012. |
| [8] |
DI Kaichang, ZHAO Qiang, WAN Wenhui, et al. RGB-D SLAM based on extended bundle adjustment with 2D and 3D information[J]. Sensors, 2016, 16(8):1285-1301.
doi: 10.3390/s16081285 |
| [9] | LEE S B, HO Y S. Real-time Stereo View Generation using Kinect Depth Camera[C]// Proceedings of 2011 Asia-Pacific Signal and Information Processing Association Annual Conference. Cambridge: Cambridge University Press, 2011: 123-133. |
| [10] | WOO W, LEE W, PARK N. Depth-assisted real-time 3D object detection for augmented reality[C]// Proceedings of ICAT’11. Osaka, Japan: World Press, 2011: 126-132. |
| [11] | Microsoft, Azure kinect dk[EB/OL]. [2020-01-20]. https://docs.microsoft.com/zh-tw/azure/Kinect-dk/. |
| [12] | K Y W, E N O, W L S. Comparative study of intel R200, Kinect v2, and primesense RGB-D sensors performance outdoors[J]. Sensors, 2019, 19(19):8741-8750. |
| [13] | ZHANG Zhengyou. Microsoft Kinect sensor and its effect[J]. IEEE MultiMedia, 2012, 19(2):4-10. |
| [14] |
VILLENA-MARTÍNEZ V, FUSTER-GUILLÓ A, AZORÍN-LÓPEZ J, et al. A quantitative comparison of calibration methods for RGB-D sensors using different technologies[J]. Sensors, 2017, 17(2):243-268.
doi: 10.3390/s17020243 |
| [15] |
SARBOLANDI H, LEFLOCH D, KOLB A. Kinect range sensing: structured-light versus time-of-flight kinect[J]. Computer Vision and Image Understanding, 2015, 139:1-20.
doi: 10.1016/j.cviu.2015.05.006 |
| [16] | TRAN V, LIN H. Accurate RGB-D camera based on structured light techniques[C]// Proceedings of 2017 International Conference on System Science and Engineering (ICSSE),. Vietnam: IEEE, 2017:235-238. |
| [17] |
YAO H, GE C, XUE J, et al. A high spatial resolution depth sensing method based on binocular structured light[J]. Sensors, 2017, 17(4):805.
doi: 10.3390/s17040805 |
| [18] | KUMARI S, GARG A, NEHRA S. A review of RGB-D sensor calibration for night vision[C]// Proceedings of 2016 International Conference on Recent Advances and Innovations in Engineering (ICRAIE). Jaipur, India: IEEE, 2016:1-6. |
| [19] | LEFLOCH D, NAIR R, LENZEN F, et al. Technical foundation and calibration methods for Time-of-Flight cameras[M]// Time-of-Flight and Depth Imaging. Sensors, Algorithms, and Applications, Berlin-Heidelberg: Springer, 2013: 3-24. |
| [20] |
HORAUD R, HANSARD M, EVANGELIDIS G, et al. An overview of depth cameras and range scanners based on time-of-flight technologies[J]. Machine Vision and Applications, 2016, 27(7):1005-1020.
doi: 10.1007/s00138-016-0784-4 |
| [21] | RICHARD HARTLEY, ANDREW ZISSERMAN. Multiple View Geometry in Computer Vision[M]. Cambridge, U.K. :Cambridge University Press, 2004. |
| [22] | SUN Jia, WANG Peng, QIN Zhengke, et al. Overview of camera calibration for computer vision[C]// Proceeding of the 11th World Congress on Intelligent Control and Automation. Shenyang, China: IEEE, 2014:86-92. |
| [23] | KACHI D, TU X W. Geometric camera calibration: theory and experiments[C]// Proceedings of 1994 IEEE International Symposium on Industrial Electronics (ISIE’94). Santiago, Chile: IEEE, 1994:298-303. |
| [24] |
SUN Junhua, LIU Zhen, ZHANG Guangjun, et al. Camera calibration based on flexible 3D target[J]. Acta Optica Sinica, 2009, 29(12):3433-3439.
doi: 10.3788/AOS |
| [25] |
HEIKKILÄ J. Geometric camera calibration using circular control points[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(10):1066-1077.
doi: 10.1109/34.879788 |
| [26] | ZHANG Zhengyou. Flexible camera calibration by viewing a plane from unknown orientations[C]// Proceedings of the Seventh IEEE International Conference on Computer Vision. Kerkyra, Greece: IEEE, 1999:666-673. |
| [27] |
ZHANG Zhengyou. Camera calibration with one-dimensional objects[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2004, 26(7):892-899.
doi: 10.1109/TPAMI.2004.21 pmid: 18579947 |
| [28] | BOUGUET J Y. Camera calibration toolbox for matlab[EB/OL]. [2020-01-20]. https://www.Vision.caltech.edu/bouguetj/calib_doc/. |
| [29] | BRADSKI G. The OpenCV library[J]. Dr. Dobb’s Journal of Software Tools, 2000, 102:122-125. |
| [30] | BROWN D C. Close-range camera calibration[J]. Photogrammetric Engineering, 1971, 37(8):855-866. |
| [31] | MORÉ J J. the levenberg-marquardt algorithm: implementation and theory[M]// WATSON G A. Lecture Notes in Mathematics. Berlin-Heidelberg: Springer, 1978: 105-116. |
| [32] | NEWCOMBE R A, IZADI S, HILLIGES O, et al. KinectFusion: Real-time dense surface mapping and tracking[C]// Proceedings of 2011 10th IEEE International Symposium on Mixed and Augmented Reality. Basel, Switzerland: IEEE, 2011:127-136. |
| [33] |
PAGLIARI D, PINTO L. Calibration of kinect for Xbox one and comparison between the two generations of microsoft sensors[J]. Sensors, 2015, 15(11):27569-27589.
doi: 10.3390/s151127569 |
| [34] | ZHANG Cha, ZHANG Zhengyou. Calibration between depth and color sensors for commodity depth cameras[C]// Proceedings of 2011 IEEE International Conference on Multimedia and Expo. Barcelona, Spain: IEEE, 2011:1-6. |
| [35] |
HERRERA C D, KANNALA J, HEIKKILÄ J. Accurate and practical calibration of a depth and color camera pair[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34:2058-2064.
doi: 10.1109/TPAMI.2012.125 |
| [36] | WU Zhengyang, ZHU Wenzhe, ZHU Qing, et al. Semi-transparent checkerboard calibration method for KINECT’s color and depth camera[C]// Proceedings of 2018 International Conference on Network, Communication, Computer Engineering (NCCE 2018). Chongqing, China: Atlantis Press, 2018:141-148. |
| [37] | JUNG J, JEONG Y, PARK J, et al. A novel 2.5D pattern for extrinsic calibration of Tof and camera fusion System[C]// Proceedings of 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco, CA: IEEE, 2011:3290-3296. |
| [38] | LI Shibo, ZHUO Qing. A new approach to calibrate range image and color image from kinect[C]// Proceedings of 2012 4th International Conference on Intelligent Human-Machine Systems and Cybernetics. Nanchang, China: IEEE, 2012:252-255. |
| [39] | LIU Weihua, FAN Yangyu, ZHONG Zhang, et al. A new method for calibrating depth and color camera pair based on Kinect[C]// Proceeding of 2012 International Conference on Audio, Language and Image Processing. Shanghai, China: IEEE, 2012:212-217. |
| [40] |
LUO P F, WU J. Easy calibration technique for stereo vision using a circle grid[J]. Optical Engineering, 2008, 47(3):033607.
doi: 10.1117/1.2897237 |
| [41] | STARANOWICZ A, BROWN G R, MORBIDI F, et al. Easy-to-Use and accurate calibration of RGB-D cameras from spheres[M]// KLETTE R, RIVERA M, SATOH S I. Image and Video Technology. Berlin-Heidelberg: Springer, 2014, 165:265-278. |
| [42] | STARANOWICZ A, MARIOTTINI G L. A comparative study of calibration methods for Kinect-style cameras[C]// Proceedings of the 5th International Conference on Pervasive Technologies Related to Assistive Environments. New York, NY: ACM, 2012. |
| [43] |
AARON N. STARANOWICZ, GARRETT R. BROWN, FABIO MORBIDI, et al. Practical and accurate calibration of RGB-D cameras using spheres[J]. Computer Vision and Image Understanding, 2018, 137,:102-114
doi: 10.1016/j.cviu.2015.03.013 |
| [44] | SUAREZ J, MURPHY R R J. Hand gesture recognition with depth images: A review[C]// Proceedings of 2012 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication, Paris, France : IEEE. 2012: 411-417. |
| [45] | MIHELICH P, KONOLIGE K. Technical description of kinect calibration[EB/OL]. [2020-01-20]. http://www.ros.org/wiki/kinect_calibration/technical. |
| [46] | SMISEK J, JANCOSEK M, PAJDLA T. 3D with Kinect[C]// Proceedings of IEEE 2011 International Conference on Computer Vision Workshops. Barcelona, Spain: IEEE, 2011:1154-1160. |
| [47] | HAMZAH R A, GHANI S F A, DIN A, et al. Visualization of image distortion on camera calibration for stereo vision application[C]// Proceedings of 2012 IEEE International Conference on Control System, Computing and Engineering,. Penang, Malaysia: IEEE, 2012:28-33. |
| [48] | RGB Demo. Calibrating the depth and color camera-home page[EB/OL]. [2017-01-21]. http://rgbdemo.org/index.php/Documentation/KinectCalibrationTheory. |
| [49] | WANG Y T, SHEN C A, YANG J S. Calibrated kinect sensors for robot simultaneous localization and mapping[C]// Proceedings of 2014 19th International Conference on Methods and Models in Automation and Robotics (MMAR). Miedzyzdroje, Poland: IEEE, 2014:560-565. |
| [50] | DAVOODIANIDALIKI M, SAADATSERESHT M. Calibrate Kinect to use in computer vision, simplified and précise[C]// Proceedings of 2013 8th Iranian Conference on Machine Vision and Image Processing (MVIP). Zanjan, Iran: IEEE, 2013:310-314. |
| [51] |
SU Pochang, SHEN Ju, XU Wanxin, et al. A fast and robust extrinsic calibration for RGB-D camera networks[J]. Sensors, 2018, 18(1):235-259.
doi: 10.3390/s18010235 |
| [52] |
ZHANG Chenyang, HUANG Teng, ZHAO Qiang. A new model of RGB-D camera calibration based on 3D control field[J]. Sensors, 2019, 19(23):5082-5102.
doi: 10.3390/s19235082 |
| [53] | FENG Wenqi. Close-range photogrammetry[M]. Wuhan: Wuhan University Press, 2002: 141-152. |
| [54] | CHOW J C K, ANG K D, LICHTI D D, et al. Performance analysis of a low-cost triangulation-based 3d camera: Microsoft kinect system[C]// Proceedings of The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Melbourne, Australia: ISPRS, 2012:175-180. |
| [55] | SHAN Jie. A brief history and essentials of bundle adjustment[J]. Geomatics and Information Science of Wuhan university, 2018, 43(12):1797-1810. |
| [56] |
CHI Chi, YANG Bisheng, SONG Shuang, et al. Calibrate multiple consumer RGB-D Cameras for low-cost and efficient 3D indoor mapping[J]. Remote Sensing, 2018, 10(2):328-357.
doi: 10.3390/rs10020328 |
| [57] | MEI Feng, LIU Jing, LI Chunpeng, et al. Improved RGB-D camera based indoor scene reconstruction[J]. Journal of Image and Graphics, 2015, 20(10):1366-1373. |
| [58] | HAGGAG H, HOSSNY M, FILIPPIDIS D, et al. Measuring depth accuracy in RGBD cameras[C]// Proceedings of 2013, 7th International Conference on Signal Processing and Communication Systems (ICSPCS). Carrara, Australia: IEEE, 2013:1-7. |
| [59] |
KHOSHELHAM K, ELBERINK S O. Accuracy and resolution of kinect depth data for indoor mapping applications[J]. Sensors, 2012, 12(2):1437-1454.
doi: 10.3390/s120201437 |
| [60] | NGUYEN C V, IZADI S, LOVELL D. Modeling kinect sensor noise for improved 3D reconstruction and tracking[C]// Proceedings of 2012 Second International Conference on 3D Imaging, Modeling, Processing, Visualization & Transmission. Zurich, Switzerland: IEEE, 2012:524-530. |
| [61] |
CHEN Guangda, CUI Guowei, JIN Zhongxiao, et al. Accurate intrinsic and extrinsic calibration of RGB-D cameras with GP-based depth correction[J]. Sensors, 2019, 19(7):2686-2694.
doi: 10.3390/s19122686 |
| [62] | BASSO F, PRETTO A, MENEGATTI E. Unsupervised intrinsic and extrinsic calibration of a camera-depth sensor couple[C]// Proceedings of 2014 IEEE International Conference on Robotics and Automation (ICRA). Hong Kong, China: IEEE, 2014:6244-6249. |
| [63] | FERSTL D, REINBACHER C, RIEGLER G, et al. Learning depth calibration of Time-of-Flight camera[C]// Proceedings of the British Machine Vision Conference. Swansea, UK: BMVA Press, 2015, 102:1-12. |
| [64] |
DI CICCO M, IOCCHI L, GRISETTI G. Non-parametric calibration for depth sensors[J]. Robotics and Autonomous Systems, 2015, 74:309-317.
doi: 10.1016/j.robot.2015.08.004 |
| [65] | TEICHMAN A, MILLER S, THRUN S. Unsupervised Intrinsic Calibration of Depth Sensors via SLAM[M]. Robotics: Science and Systems. MIT Press: IEEE, 2013. |
| [66] | QUENZEL J, ROSU R A, HOUBEN S, et al. Online depth calibration for RGB-D cameras using visual SLAM[C]// Proceedings of 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, BC, Canada: IEEE, 2017:2227-2234. |
| [67] | MILLER S, TEICHMAN A, THRUN S. Unsupervised extrinsic calibration of depth sensors in dynamic scenes[C]// Proceedings of 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan: IEEE, 2013:2695-2702. |
| [68] |
CANESSA A, CHESSA M, GIBALDI A, et al. Calibrated depth and color cameras for accurate 3D interaction in a stereoscopic augmented reality environment[J]. Journal of Visual Communication and Image Representation, 2014, 25(1):227-237.
doi: 10.1016/j.jvcir.2013.02.011 |
| [69] | GUI Popo, YE Qin, CHEN Hongmin, et al. Accurately calibrate kinect sensor using indoor control Field[C]// Proceedings of 2014 Third International Workshop on Earth Observation and Remote Sensing Applications (EORSA). Changsha, China: IEEE, 2014:9-13. |
| [70] |
DANIEL H C, KANNALA J, HEIKKILÄ J. Joint depth and color camera calibration with distortion correction[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(10):2058-2064.
doi: 10.1109/TPAMI.2012.125 |
| [71] | GUO Lianpeng, CHEN Xiangning, LIU Bin. Calibration of Kinect sensor with depth and color camera[J]. Journal of Image and Graphics, 2014, 19(11):1584-1590. |
| [72] | RAPOSO C, BARRETO J P, NUNES U. Fast and accurate calibration of a kinect sensor[C]// Proceedings of 2013 International Conference on 3D Vision - 3DV 2013. Seattle, WA: IEEE, 2013:342-349. |
| [73] | JIN Bingwen, LEI Hao, GENG Weidong. Accurate intrinsic calibration of depth camera with cuboids[C]// Proceedings of European Conference on Computer Vision. Cham: Springer, 2014:788-803. |
| [74] | YAMAZOE H, HABE H, MITSUGAMI I, et al. Easy depth sensor calibration[C]// Proceedings of the 21st International Conference on Pattern Recognition (ICPR2012). Tsukuba, Japan: IEEE, 2012:465-468. |
| [75] |
YAMAZOE H, HABE H, MITSUGAMI I, et al. Depth error correction for projector-camera based consumer depth cameras[J]. Computational Visual Media, 2018, 4(2):103-111.
doi: 10.1007/s41095-017-0103-7 |
| [76] |
ZHAO W Y, NANDHAKUMAR N. Effects of camera alignment errors on stereoscopic depth estimates[J]. Pattern Recognition, 1996, 29(12):2115-2126.
doi: 10.1016/S0031-3203(96)00051-9 |
| [77] | KIM J H, CHOI J S, KOO B K. Calibration of multi-Kinect and multi-camera setup for full 3D Reconstruction[C]// Proceedings of IEEE ISR 2013. Seoul, Korea (South): IEEE, 2013:1-5. |
| [78] |
DARWISH W, TANG S J, LI Wenbin, et al. A new calibration method for commercial RGB-D sensors[J]. Sensors, 2017, 17(6):1204-1220.
doi: 10.3390/s17061204 |
| [79] | KAHLMANN T, INGENSAND H. Calibration and improvements of the high-resolution range-imaging camera Swiss ranger[C]// Proceedings of SPIE 5665, Videometrics VIII. San Jose, CA: SPIE, 2005:144-155. |
| [80] |
CORTI A, GIANCOLA S, MAINETTI G, et al. A metrological characterization of the Kinect V2 time-of-flight camera[J]. Robotics and Autonomous Systems, 2016, 75:584-594.
doi: 10.1016/j.robot.2015.09.024 |
| [81] | LINDNER M, KOLB A. Lateral and depth calibration of PMD-distance sensors[M]// BEBIS G, BOYLE R, PARVIN B, et al. Advances in Visual Computing. Berlin-Heidelberg: Springer, 2006. |
| [82] | BELHEDI A, BOURGEOIS S, GAY-BELLILE V, et al. Non-parametric depth calibration of a TOF camera[C]// Proceedings of 2012 19th IEEE International Conference on Image Processing. Orlando, FL: IEEE, 2012:549-552. |
| [83] | LINDER M, KOLB A. Calibration of the intensity-related distance error of the PMD TOF-camera[C]// Proceedings of SPIE 6764, Intelligent Robots and Computer Vision XXV: Algorithms, Techniques, and Active Vision. Boston, MA, United States: SPIE, 2007: 67640W. |
| [84] | FUCHS S, HIRZINGER G. Extrinsic and depth calibration of TOF-cameras[C]// Proceedings of 2008 IEEE Conference on Computer Vision and Pattern Recognition. Anchorage, AK: IEEE, 2008:1-6. |
| [85] | SCHILLER I, BEDER C, KOCH R. Calibration of a PMD-camera using a planar calibration pattern together with a multi-camera setup[J]. International Journal of Geo-Information, 2012, 37:297-302. |
| [86] |
BEDER C, KOCH R. Calibration of focal length and 3D pose based on the reflectance and depth image of a planar object[J]. International Journal of Intelligent Systems Technologies and Applications, 2008, 5(3-4):285.
doi: 10.1504/IJISTA.2008.021291 |
| [87] |
LINDNER M, SCHILLER I, KOLB A, et al. Time-of-Flight sensor calibration for accurate range sensing[J]. Computer Vision and Image Understanding, 2010, 114(12):1318-1328.
doi: 10.1016/j.cviu.2009.11.002 |
| [88] |
SHIM H, ADELSBERGER R, KIM J D, et al. Time-of-flight sensor and color camera calibration for multi-view acquisition[J]. The Visual Computer, 2012, 28(12):1139-1151.
doi: 10.1007/s00371-011-0664-x |
| [89] | KIM Y M, CHAN D, THEOBALT C, et al. Design and calibration of a multi-view TOF sensor fusion system[C]// Proceedings of 2008 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops. Anchorage, AK: IEEE, 2008:1-7. |
| [90] | KIM S Y, CHO W, KOSCHAN A, et al. Depth data calibration and enhancement of time-of-flight video-plus-depth camera[C]// Proceedings of 2011 Future of Instrumentation International Workshop (FIIW) Proceedings. Oak Ridge, TN: IEEE, 2011:126-129. |
| [91] |
BASSO F, MENEGATTI E, PRETTO A. Robust Intrinsic and Extrinsic Calibration of RGB-D Cameras[J]. IEEE Transactions on Robotics, 2018, 34(5):1315-1332.
doi: 10.1109/TRO.8860 |
| [92] |
JUNG J, LEE J Y, JEONG Y, et al. Time-of-Flight sensor calibration for a color and depth camera pair[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(7):1501-1513.
doi: 10.1109/TPAMI.2014.2363827 |
| [93] |
LACHAT E, MACHER H, LANDES T, et al. Assessment and calibration of a RGB-D camera (Kinect V2 Sensor) towards a potential use for close-range 3D modeling[J]. Remote Sensing, 2015, 7(10):13070-13097.
doi: 10.3390/rs71013070 |
| [94] |
CHOW J C K, LICHTI D D. Photogrammetric bundle adjustment with self-calibration of the primeSense 3D camera technology: Microsoft kinect[J]. IEEE Access, 2013, 1:465-474.
doi: 10.1109/ACCESS.2013.2271860 |
| [95] |
TERVEN J R, CÓRDOVA-ESPARZA D M. A kinect 2 toolbox for MATLAB[J]. Science of Computer Programming, 2016, 130:97-106.
doi: 10.1016/j.scico.2016.05.009 |
| [96] | MACKNOJIA R, CHÁVEZ-ARAGÓN A, PAYEUR P, et al. Calibration of a network of Kinect sensors for robotic inspection over a large workspace[C]// Proceedings of 2013 IEEE Workshop on Robot Vision (WORV). Clearwater Beach, FL: IEEE, 2013:184-190. |
| [97] |
ZHANG Zhengyou. Iterative point matching for registration of free-form curves and surfaces[J]. International Journal of Computer Vision, 1994, 13(2):119-152.
doi: 10.1007/BF01427149 |
| [98] | AMPLIANITIS K, ADDUCI M, REULKE R. Calibration of a multiple stereo and RGB-D camera system for 3D human tracking[J]. ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2014:7-14. |
| [99] | MAIMONE A, FUCHS H. Encumbrance-free tele-presence system with real-time 3D capture and display using commodity depth cameras[C]// Proceedings of 2011 10th IEEE International Symposium on Mixed and Augmented Reality. Basel, Switzerland: IEEE, 2012:137-146. |
| [100] | AFZAL H, AOUADA D, FONT D, et al. RGB-D multi-view system calibration for full 3D scene Reconstruction [C]//Proceedings of 2014 22nd International Conference on Pattern Recognition. Stockholm, Sweden: IEEE, 2014:2459-2464. |
| [101] | LI S Y, PATHIRANA P N, BONACCI J. A general pose estimation algorithm in a multi-kinect system[C]// Proceedings of the 7th International Conference on Information and Automation for Sustainability. Colombo, Sri Lanka: IEEE, 2014:1-5. |
| [102] | LI S Y, PATHIRANA P N, CAELLI T. Multi-kinect skeleton fusion for physical rehabilitation monitoring[C]// Proceedings of 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Chicago, IL: IEEE, 2014:5060-5063. |
| [103] | TAO Wei, LEE B, QIAO Yuansong, et al. Experimental study of skeleton tracking abilities from Microsoft kinect non-frontal views[C]// Proceedings of 2015 3DTV-Conference: The True Vision-Capture, Transmission and Display of 3D Video (3DTV-CON). Lisbon, Portugal: IEEE, 2015:1-4. |
| [104] | OBDRŽÁLEK S, KURILLO G, OFLI F, et al. Accuracy and robustness of Kinect pose estimation in the context of coaching of elderly population[C]// Proceedings of 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society. San Diego, CA: IEEE, 2012:1188-1193. |
| [105] | Kinect for Windows SDK[EB/OL]. [2020-01-20]. https://www.microsoft.com/en-us/download/details.aspx?id=44561. |
| [106] |
HAN Y, CHUNG S L, YEH J S, et al. Calibration of D-RGB camera networks by skeleton-based viewpoint invariance transformation[J]. Acta Physica Sinica, 2014, 63(7):074211.
doi: 10.7498/aps.63.074211 |
| [107] |
AHMED N, JUNEJO I N. Using multiple RGB-D cameras for 3D video acquisition and spatio-temporally coherent 3D animation reconstruction[J]. International Journal of Computer Theory and Engineering, 2014, 6(5):447-450.
doi: 10.7763/IJCTE.2014.V6.907 |
| [108] | PALASEK P, YANG Heng, XU Zongyi, et al. A flexible calibration method of multiple Kinects for 3D human reconstruction[C]// Proceedings of 2015 IEEE International Conference on Multimedia & Expo Workshops (ICMEW). Turin, Italy: IEEE, 2015:1-4. |
| [109] | KUMAR R K, ILIE A, FRAHM J M, et al. Simple calibration of non-overlapping cameras with a mirror[C]// Proceedings of 2008 IEEE Conference on Computer Vision and Pattern Recognition. Anchorage, AK: IEEE, 2008:1-7. |
| [110] | YANG R S, CHAN Y H, GONG R, et al. Multi-Kinect scene reconstruction: Calibration and depth inconsistencies[C]// Proceedings of 2013 28th International Conference on Image and Vision Computing. Wellington, New Zealand: IEEE, 2013: 47-52. |
| [111] | KAHLESZ F, LILGE C, KLEIN R. Easy-to-use calibration of multiple-camera setups[J], Workshop on Camera Calibration Methods for ComputerVision Systems, 2007. |
| [112] |
LIU Hang, LI Hengyu, LIU Xiahua, et al. A novel method for extrinsic calibration of multiple RGB-Drgb-d cameras using descriptor-based patterns[J]. Sensors, 2019, 19(2):349-363.
doi: 10.3390/s19020349 |
| [113] | SHEN Ju, XU Wanxin, LUO Ying, et al. Extrinsic calibration for wide-baseline RGB-D camera network[C]// Proceedings of 2014 IEEE 16th International Workshop on Multimedia Signal Processing (MMSP). Jakarta, Indonesia: IEEE, 2014:1-6. |
| [114] | RUAN Minghao, HUBER D. Calibration of 3D sensors using a spherical target[C]// Proceedings of 2014 2nd International Conference on 3D Vision, Tokyo, Japan: IEEE, 2014: 187-193. |
| [115] |
FORNASER A, TOMASIN P, DE CECCO M, et al. Automatic graph based spatiotemporal extrinsic calibration of multiple Kinect V2 TOF cameras[J]. Robotics and Autonomous Systems, 2017, 98:105-125.
doi: 10.1016/j.robot.2017.09.007 |
| [116] |
PEREZ-YUS A, FERNANDEZ-MORAL E, LOPEZ-NICOLAS G, et al. Extrinsic calibration of multiple RGB-D cameras from line observations[J]. IEEE Robotics and Automation Letters, 2018, 3(1):273-280.
doi: 10.1109/LRA.2017.2739104 |
| [117] | FISCHLER M A, BOLLES R C. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography[M]// FISCHLER M A, FIRSCHEIN Q. Readings in Computer Vision. Reading, MA: Elsevier, 1987: 726-740. |
| [118] | VARADARAJAN V S. Lie groups, Lie algebras, and their representations[M]. New York, NY: Springer, 1984. |
| [119] | FERNÁNDEZ-MORAL E, GONZÁLEZ-JIMÉNEZ J, RIVES P, et al. Extrinsic calibration of a set of range cameras in 5 seconds without pattern[C]// Proceedings of 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Chicago, IL: IEEE, 2014:429-435. |
| [120] | AVETISYAN R, WILLERT M, OHL S, et al. Calibration of Depth Camera Arrays[C]// Proceedings of the 13th SIGRAD 2014 Conference of the Swedish Eurographics Chapter, 2014. |
| [121] | NAKAZAWA M, MITSUGAMI I, HABE H, et al. Calibration of multiple kinects with little overlap regions[J]. Transactions on Electrical and Electronic Engineering, 2015, 10(S1):S108-S115. |
| [122] |
CÓRDOVA-ESPARZA D M, TERVEN J R, JIMÉNEZ-HERNÁNDEZ H, et al. A multiple camera calibration and point cloud fusion tool for Kinect V2[J]. Science of Computer Programming, 2017, 143:1-8.
doi: 10.1016/j.scico.2016.11.004 |
| [123] | BERGER K, RUHL K, ALBERS M, et al. The capturing of turbulent gas flows using multiple Kinects[C]// Proceedings of 2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops). Barcelona, Spain: IEEE, 2011:1108-1113. |
| [124] |
TONG Jing, ZHOU Jin, LIU Ligang, et al. Scanning 3D full human bodies using kinects[J]. IEEE Transactions on Visualization and Computer Graphics, 2012, 18(4):643-650.
doi: 10.1109/TVCG.2012.56 |
| [125] | FAION F, FRIEDBERGER S, ZEA A, et al. Intelligent sensor-scheduling for multi-kinect-tracking[C]// Proceedings of 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve, Portugal: IEEE, 2012:3993-3999. |
| [126] | BUTLER D A, IZADI S, HILLIGES O, et al. Shake'n'sense: reducing interference for overlapping structured light depth cameras[C]// Proceedings of the SIGCHI Conference on Human Factors in Computing Systems. New York, NY: ACM, 2012:1933-1936. |
| [127] | MAIMONE A, FUCHS H. Reducing interference between multiple structured light depth sensors using motion[C]// Proceedings of 2012 IEEE Virtual Reality Workshops (VRW). Costa Mesa, CA: IEEE, 2012:51-54. |
| [128] | LEMKENS W, KAUR P, BUYS K, et al. Multi RGB-D camera setup for generating large 3D point clouds[C]// Proceedings of 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan: IEEE, 2013:1092-1099. |
| [129] | MALLICK T, DAS P P, MAJUMDAR A K. Study of interference noise in multi-kinect set-up[C]// Proceedings of 2014 International Conference on Computer Vision Theory and Applications (VISAPP). Lisbon, Portugal: IEEE, 2014:173-178. |
| [130] | GAO Xiang, ZHANG Tao. Loop closure detection for visual SLAM systems using deep neural networks[C]// Proceedings of 2015 34th Chinese Control Conference (CCC). Hangzhou, China: IEEE, 2015:5851-5856. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||