
Journal of Geodesy and Geoinformation Science ›› 2021, Vol. 4 ›› Issue (3): 72-90.doi: 10.11947/j.JGGS.2021.0307
• Special Issue • Previous Articles Next Articles
Yusheng XU1( ),Rong HUANG1(),Xiaohua TONG2,Uwe STILLA1
),Rong HUANG1(),Xiaohua TONG2,Uwe STILLA1
Received:2020-09-15
Accepted:2021-01-15
Online:2021-09-20
Published:2021-10-09
Contact:
Rong HUANG
E-mail:yusheng,xu@tum.de;rong.huang@tum.de
About author:Yusheng XU, male, PhD, majors in photogrammetry and remote sensing. E-mail: Supported by:Yusheng XU,Rong HUANG,Xiaohua TONG,Uwe STILLA. Exploiting Robust Estimators in Phase Correlation of 3D Point Clouds for 6 DoF Pose Estimation[J]. Journal of Geodesy and Geoinformation Science, 2021, 4(3): 72-90.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig.1
A comparison of different ways of using robust estimators in the correspondence based methods and our proposed method"
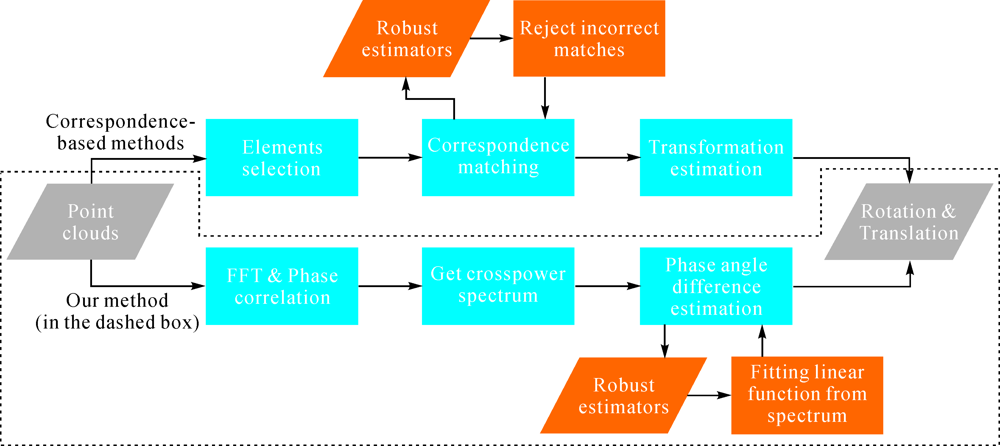

Fig.2
Two different manners of voxelizing a point cloud (A 2D illustration)"
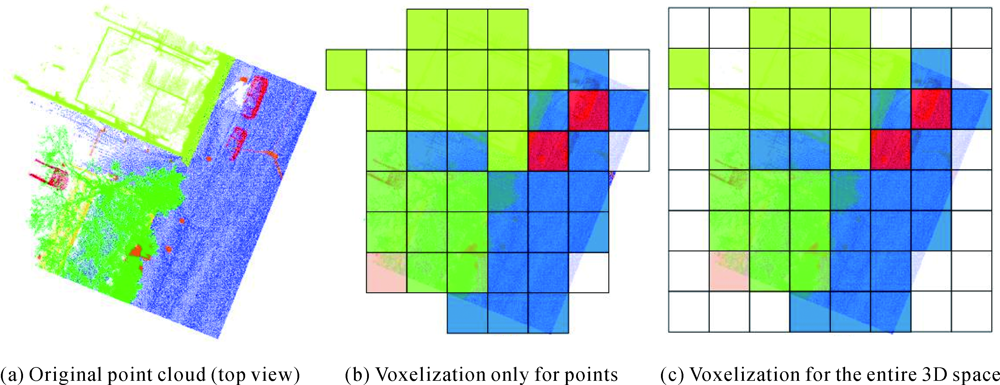

Fig.3
Keys steps in the estimation of 3D rotation"


Fig.4
Test datasets"
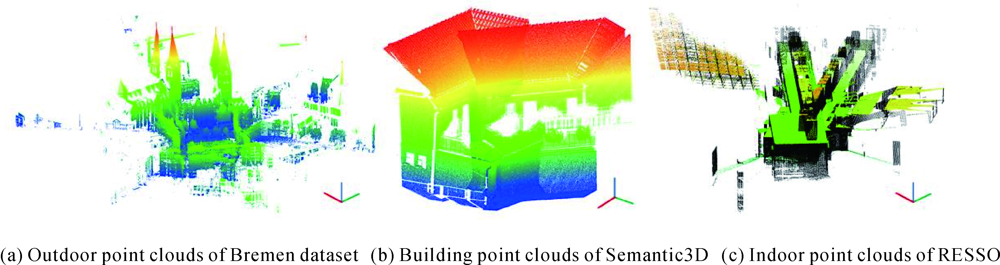

Fig.5
Adding noise to the point cloud"
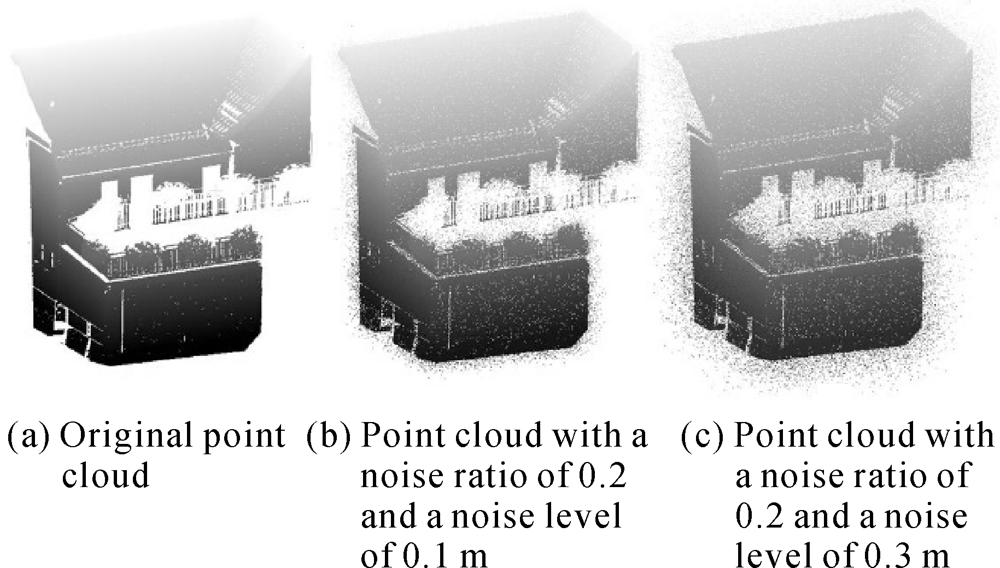
Fig.6
Illustration of the registration results"
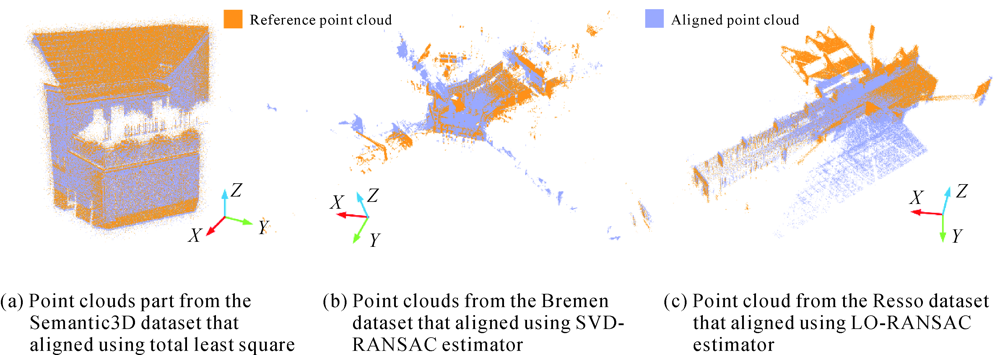

Fig.7
Sensitivity analysis of different estimators under different noise levels using the point cloud part from Semantic3D dataset"
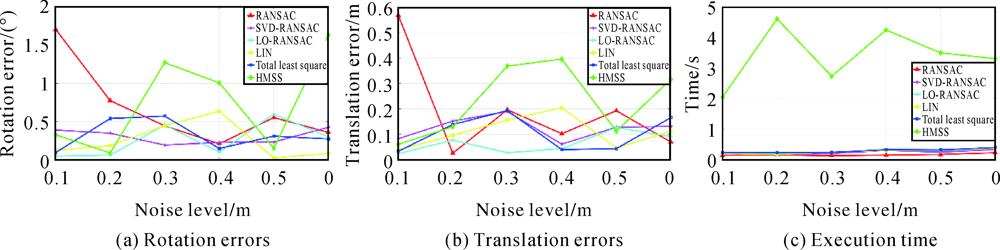

Fig.8
Sensitivity analysis of different estimators under different noise levels using the Bremen dataset"
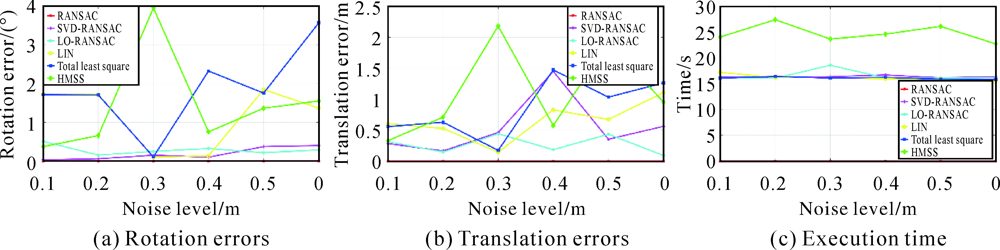

Fig.9
Sensitivity analysis of different estimators under different noise levels using the Resso dataset"
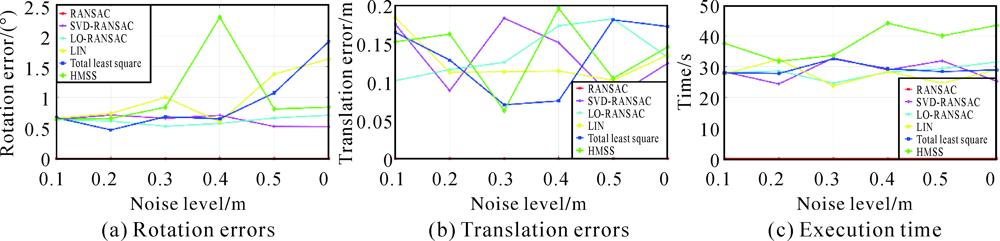

Fig.10
Sensitivity analysis of different estimators under different noise ratios using the point cloud part from Semantic3D dataset"
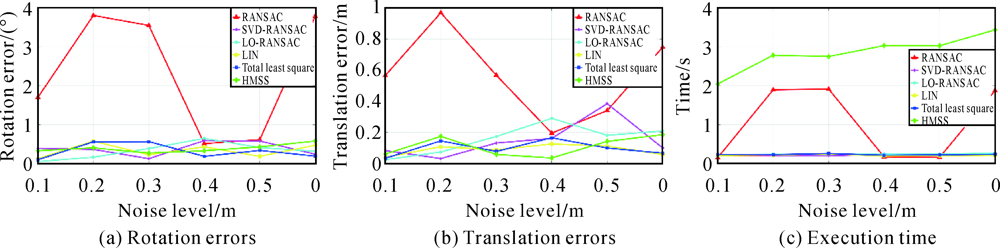
Fig.11
Sensitivity analysis of different estimators under different noise ratios using the Bremen dataset"

Fig.12
Sensitivity analysis of different estimators under different noise ratios using the Resso dataset"
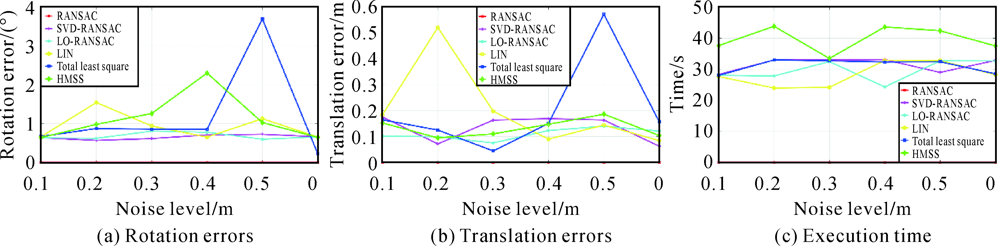
Fig.13
Sensitivity analysis of different estimators under different overlap ratios using the point cloud part from the Semantic3D dataset"
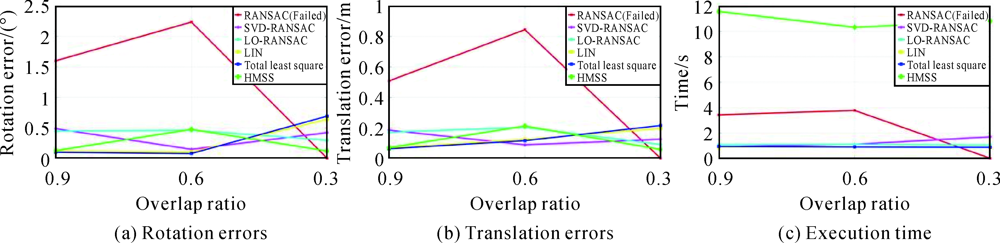

Fig.14
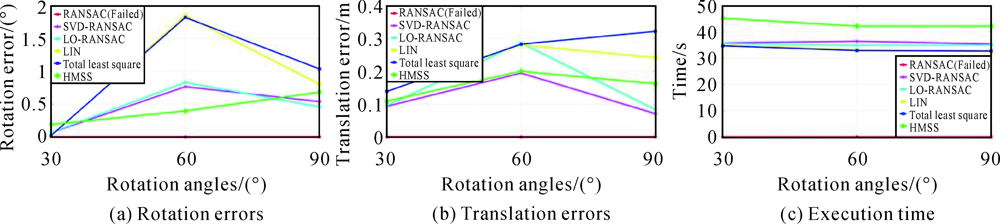
Sensitivity analysis of different estimators under different initial orientations using the point cloud from the Resso dataset"
| [1] |
XU Yusheng, BOERNER R, YAO Wei, et al. Pairwise coarse registration of point clouds in urban scenes using voxel-based 4-planes congruent sets[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019,151:106-123.
doi: 10.1016/j.isprsjprs.2019.02.015 |
| [2] |
LAFARGE F, MALLET C. Creating large-scale city models from 3D-point clouds: a robust approach with hybrid representation[J]. International Journal of Computer Vision, 2012,99(1):69-85.
doi: 10.1007/s11263-012-0517-8 |
| [3] |
YAN Li, DAI Jicheng, TAN Junxiang, et al. Global fine registration of point cloud in LiDAR SLAM based on pose graph[J]. Journal of Geodesy and Geoinformation Science, 2020,3(2):26-35. DOI: 10.11947/j.JGGS.2020.0203.
doi: 10.11947/j.JGGS.2020.0203 |
| [4] |
YANG Ze, KANG Zhizhong, YANG Juntao. A semiautomatic registration method for Chang’e-1 imagery based on globally geo-reference LROC-WAC mosaic imagery[J]. IEEE Geoscience and Remote Sensing Letters, 2021,18(3):543-547.
doi: 10.1109/LGRS.8859 |
| [5] |
ZHANG Yongjun, XIONG Xiaodong, WANG Mengqiu, et al. A fast aerial image matching method using airborne LiDAR point cloud and POS data[J]. Journal of Geodesy and Geoinformation Science, 2019,2(1):26-36. DOI: 10.11947/j.JGGS.2019.0104.
doi: 10.11947/j.JGGS.2019.0104 |
| [6] |
HEBEL M, ARENS M, STILLA U. Change detection in urban areas by object-based analysis and on-the-fly comparison of multi-view ALS data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013,86:52-64.
doi: 10.1016/j.isprsjprs.2013.09.005 |
| [7] |
KANG Zhizhong, YANG Juntao, ZHONG Ruofei. A Bayesian-network-based classification method integrating airborne LiDAR data with optical images[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2017,10(4):1651-1661.
doi: 10.1109/JSTARS.4609443 |
| [8] |
BÜLOW H, BIRK A. Spectral 6dof registration of noisy 3D range data with partial overlap[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013,35(4):954-969.
doi: 10.1109/TPAMI.2012.173 |
| [9] |
HUANG Rong, XU Yusheng, YAO Wei, et al. Robust global registration of point clouds by closed-form solution in the frequency domain[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2021,171:310-329.
doi: 10.1016/j.isprsjprs.2020.11.014 |
| [10] |
GE Xuming. Automatic markerless registration of point clouds with semantic-keypoint-based 4-points congruent sets[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017,130:344-357.
doi: 10.1016/j.isprsjprs.2017.06.011 |
| [11] |
THEILER P W, WEGNER J D, SCHINDLER K. Keypoint-based 4-Points Congruent Sets-Automated marker-less registration of laser scans[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014,96:149-163.
doi: 10.1016/j.isprsjprs.2014.06.015 |
| [12] |
XU Y, BOERNER R, YAO W, et al. Automated coarse registration of point clouds in 3D urban scenes using voxel based plane constraint[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2017, IV-2/W4:185-191.
doi: 10.5194/isprs-annals-IV-2-W4-185-2017 |
| [13] |
THEILER P W, SCHINDLER K. Automatic registration of terrestrial laser scanner point clouds using natural planar surfaces[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2012, I-3:173-178.
doi: 10.5194/isprsannals-I-3-173-2012 |
| [14] | HABIB A, DETCHEV I, BANG K. A comparative analysis of two approaches for multiple-surface registration of irregular point clouds[C]//Proceedings of the 2010 Canadian Geomatics Conference and Symposium of Commission I, ISPRS Convergence in Geomatics-Shaping Canada’s Competitive Landscape. Calgary, AB, Canada: [s.n.], 2010. |
| [15] |
CHEN Songlin, NAN Liangliang, XIA Renbo, et al. PLADE: A plane-based descriptor for point cloud registration with small overlap[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020,58(4):2530-2540.
doi: 10.1109/TGRS.36 |
| [16] |
YANG B, ZANG Y. Automated registration of dense terrestrial laser-scanning point clouds using curves[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014,95:109-121.
doi: 10.1016/j.isprsjprs.2014.05.012 |
| [17] | BESL P J, MCKAY N D. A method for registration of 3-D shapes[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 1992,14(2):239-256. |
| [18] | BÖHM J, BECKER S. Automatic marker-free registration of terrestrial laser scans using reflectance features[C]//Proceedings of the 8th Conference on Optical 3D Measurement Techniques. Zurich, Switzerland: [s.n.], 2007: 9-12. |
| [19] |
WEINMANN M, WEINMANN M, HINZ S, et al. Fast and automatic image-based registration of TLS data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2011,66(6):S62-S70.
doi: 10.1016/j.isprsjprs.2011.09.010 |
| [20] |
WEBER T, HÄNSCH R, HELLWICH O. Automatic registration of unordered point clouds acquired by Kinect sensors using an overlap heuristic[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015,102:96-109.
doi: 10.1016/j.isprsjprs.2014.12.014 |
| [21] |
YANG Bisheng, DONG Zhen, LIANG Fuxun, et al. Automatic registration of large-scale urban scene point clouds based on semantic feature points[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2016,113:43-58.
doi: 10.1016/j.isprsjprs.2015.12.005 |
| [22] | HOLZ D, ICHIM A E, TOMBARI F, et al. Registration with the point cloud library: A modular framework for aligning in 3-D[J]. IEEE Robotics & Automation Magazine, 2015,22(4):110-124. |
| [23] |
FISCHLER M A, BOLLES R C. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography[J]. Communications of the ACM, 1981,24(6):381-395.
doi: 10.1145/358669.358692 |
| [24] |
XIAO Junhao, ADLER B, ZHANG Jianwei, et al. Planar segment based three-dimensional point cloud registration in outdoor environments[J]. Journal of Field Robotics, 2013,30(4):552-582.
doi: 10.1002/rob.21457 |
| [25] | AIGER D, MITRA N J, COHEN-OR D. 4-points congruent sets for robust pairwise surface registration[J]. ACM Transactions on Graphics, 2008,27(3):85. |
| [26] |
HUANG Jida, KWOK T H, ZHOU Chi. V4PCS: Volumetric 4PCS algorithm for global registration[J]. Journal of Mechanical Design, 2017,139(11):111403.
doi: 10.1115/1.4037477 |
| [27] |
QUAN Siwen, YANG Jiaqi. Compatibility-guided sampling consensus for 3-D point cloud registration[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020,58(10):7380-7392.
doi: 10.1109/TGRS.36 |
| [28] |
MYRONENKO A, SONG Xubo. Point set registration: Coherent point drift[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010,32(12):2262-2275.
doi: 10.1109/TPAMI.2010.46 |
| [29] | TSIN Y, KANADE T. A correlation-based approach to robust point set registration[C]// Proceedings of European Conference on Computer Vision. Prague, Czech Republic: Springer, 2004: 558-569. |
| [30] | WANG Baoqian, KANG Zhizhong. Self-closure global registration for subway tunnel point clouds[C]// Proceedings of 2012 International Conference on Computer Vision in Remote Sensing. Xiamen, China: IEEE, 2012: 152-157. |
| [31] |
LEI Huan, JIANG Guang, QUAN Long. Fast descriptors and correspondence propagation for robust global point cloud registration[J]. IEEE Transactions on Image Processing, 2017,26(8):3614-3623.
doi: 10.1109/TIP.2017.2700727 pmid: 28475056 |
| [32] | LIU Yinlong, WANG Chen, SONG Zhijian, et al. Efficient global point cloud registration by matching rotation invariant features through translation search[C]//Proceedings of the European Conference on Computer Vision. Munich, Germany: Springer, 2018: 448-463. |
| [33] |
DONG Zhen, YANG Bisheng, LIANG Fuxun, et al. Hierarchical registration of unordered TLS point clouds based on binary shape context descriptor[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2018,144:61-79.
doi: 10.1016/j.isprsjprs.2018.06.018 |
| [34] | PAN Yue, YANG Bisheng, LIANG Fuxun, et al. Iterative global similarity points: A robust coarse-to-fine integration solution for pairwise 3D point cloud registration[C]// Proceedings of 2018 International Conference on 3D Vision (3DV). Verona, Italy: IEEE, 2018: 180-189. |
| [35] | HUANG R, YE Z, BOERNER R, et al. Fast pairwise coarse registration between point clouds of construction sites using 2D projection based phase correlation[C]// Proceedings of ISPRS Geospatial Week 2019. Enschede, The Netherlands: ISPRS, 2019, XLII-2/W13:1015-1020. |
| [36] |
KANG Zhizhong, LI J, ZHANG Liqiang, et al. Automatic registration of terrestrial laser scanning point clouds using panoramic reflectance images[J]. Sensors, 2009,9(4):2621-2646.
doi: 10.3390/s90402621 pmid: 22574036 |
| [37] |
ZHANG Shuang, WANG Hua, GAO Jingang, et al. Frequency domain point cloud registration based on the fourier transform[J]. Journal of Visual Communication and Image Representation, 2019,61:170-177.
doi: 10.1016/j.jvcir.2019.03.005 |
| [38] | DIMITRIEVSKI M, VAN HAMME D, VEELAERT P, et al. Robust matching of occupancy maps for odometry in autonomous vehicles[C]//Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications - Volume 3: VISAPP. Rome, Italy: [s.n.], 2016: 626-633. |
| [39] |
HUANG R, XU Y, HOEGNER L, et al. Efficient estimation of 3d shifts between point clouds using low-frequency components of phase correlation[J]. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2020, V-2-2020:227-234.
doi: 10.5194/isprs-annals-V-2-2020-227-2020 |
| [40] |
BÜLOW H, BIRK A. Scale-free registrations in 3D: 7 degrees of freedom with Fourier-Mellin SOFT transforms[J]. International Journal of Computer Vision, 2018,126(7):731-750.
doi: 10.1007/s11263-018-1067-5 |
| [41] |
HORN B K P, HILDEN H M, NEGAHDARIPOUR S. Closed-form solution of absolute orientation using orthonormal matrices[J]. Journal of the Optical Society of America A, 1988,5(7):1127-1135.
doi: 10.1364/JOSAA.5.001127 |
| [42] |
GEHRUNG J, HEBEL M, ARENS M, et al. A framework for voxel-based global scale modeling of urban environments[J]. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2016, XLII-2/W1:45-51.
doi: 10.5194/isprs-archives-XLII-2-W1-45-2016 |
| [43] | XU Yusheng, HOEGNER L, TUTTAS S, et al. A voxel- and graph-based strategy for segmenting man-made infrastructures using perceptual grouping laws: Comparison and evaluation[J]. Photogrammetric Engineering & Remote Sensing, 2018,84(6):377-391. |
| [44] |
TONG Xiaohua, YE Zhen, XU Yusheng, et al. Image registration with fourier-based image correlation: A comprehensive review of developments and applications[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019,12(10):4062-4081.
doi: 10.1109/JSTARS.2019.2937690 |
| [45] |
LEPRINCE S, BARBOT S, AYOUB F, et al. Automatic and precise orthorectification, coregistration, and subpixel correlation of satellite images, application to ground deformation measurements[J]. IEEE Transactions on Geoscience and Remote Sensing, 2007,45(6):1529-1558.
doi: 10.1109/TGRS.2006.888937 |
| [46] |
TONG Xiaohua, YE Zhen, XU Yusheng, et al. A novel subpixel phase correlation method using singular value decomposition and unified random sample consensus[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015,53(8):4143-4156.
doi: 10.1109/TGRS.2015.2391999 |
| [47] |
TONG Xiaohua, XU Yusheng, YE Zhen, et al. An improved phase correlation method based on 2-D plane fitting and the maximum kernel density estimator[J]. IEEE Geoscience and Remote Sensing Letters, 2015,12(9):1953-1957.
doi: 10.1109/LGRS.2015.2440340 |
| [48] | CHUM O, MATAS J, KITTLER J. Locally optimized RANSAC[C]// Proceedings of Joint Pattern Recognition Symposium. Magdeburg, Germany: Springer, 2003: 236-243. |
| [49] | LEBEDA K, MATAS J, CHUM O. Fixing the locally optimized RANSAC - full experimental evaluation[R]. Czech Republic: Czech Technical University, 2012. |
| [50] |
KRYSTEK M, ANTON M. A weighted total least-squares algorithm for fitting a straight line[J]. Measurement Science and Technology, 2007,18(11):3438-3442.
doi: 10.1088/0957-0233/18/11/025 |
| [51] |
TENNAKOON R B, BAB-HADIASHAR A, CAO Zhenwei, et al. Robust model fitting using higher than minimal subset sampling[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016,38(2):350-362.
doi: 10.1109/TPAMI.2015.2448103 |
| [52] |
YE Zhen, KANG Jian, YAO Jing, et al. Robust fine registration of multisensor remote sensing images based on enhanced subpixel phase correlation[J]. Sensors, 2020,20(15):4338.
doi: 10.3390/s20154338 |
| [53] | BORRMANN D, ELSEBERG J, NÜCHTER A. Thermal 3D mapping of building facades[C]// Proceedings of Intelligent Autonomous Systems 12. Jeju Island, Korea: Springer, 2013: 173-182. |
| [54] |
HACKEL T, SAVINOV N, LADICKY L, et al. Semantic3d.net: A new large-scale point cloud classification benchmark[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2017, IV-1/W1:91-98.
doi: 10.5194/isprs-annals-IV-1-W1-91-2017 |
| [55] |
XU Yusheng, TUTTAS S, HOEGNER L, et al. Reconstruction of scaffolds from a photogrammetric point cloud of construction sites using a novel 3D local feature descriptor[J]. Automation in Construction, 2018,85:76-95.
doi: 10.1016/j.autcon.2017.09.014 |
| [1] | Chuanqi CHENG,Xiangyang HAO,Jiansheng LI,Peng HU,Xu ZHANG. A Robust Gaussian Mixture Model for Mobile Robots’ Vision-based Pose Estimation [J]. Journal of Geodesy and Geoinformation Science, 2019, 2(3): 79-90. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||