
Journal of Geodesy and Geoinformation Science ›› 2024, Vol. 7 ›› Issue (2): 18-36.doi: 10.11947/j.JGGS.2024.0202
Previous Articles Next Articles
CHAN Ting On1,2,3( ), XIAO Hang1, XIA Linyuan1,2(), LICHTI Derek D.4, LI Ming Ho1, DU Guoming1,2
), XIAO Hang1, XIA Linyuan1,2(), LICHTI Derek D.4, LI Ming Ho1, DU Guoming1,2
Published:2024-06-25
Online:2024-09-04
Contact:
XIA Linyuan.E-mail: About author:CHAN Ting On, PhD, majors in geomatics engineering. E-mail: chantingon@mail.sysu.edu.cn.
Supported by:CHAN Ting On, XIAO Hang, XIA Linyuan, LICHTI Derek D., LI Ming Ho, DU Guoming. Optimization of the Use of Spherical Targets for Point Cloud Registration Using Monte Carlo Simulation[J]. Journal of Geodesy and Geoinformation Science, 2024, 7(2): 18-36.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Figure 1
Simulated registration set-up"
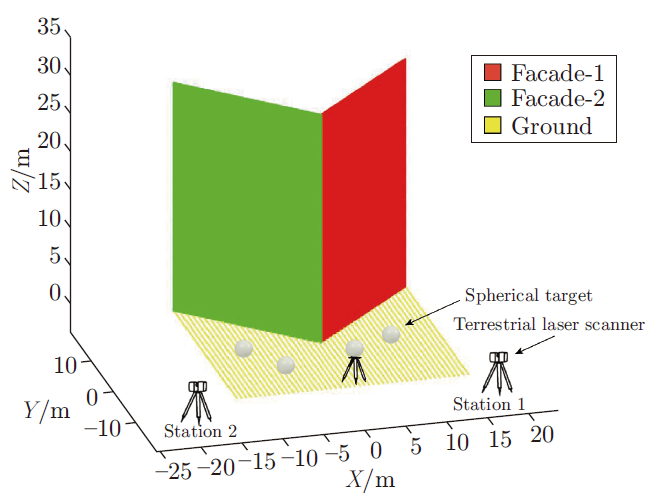

Figure 2
Geometry-based check-up criteria: FTD and TSD"
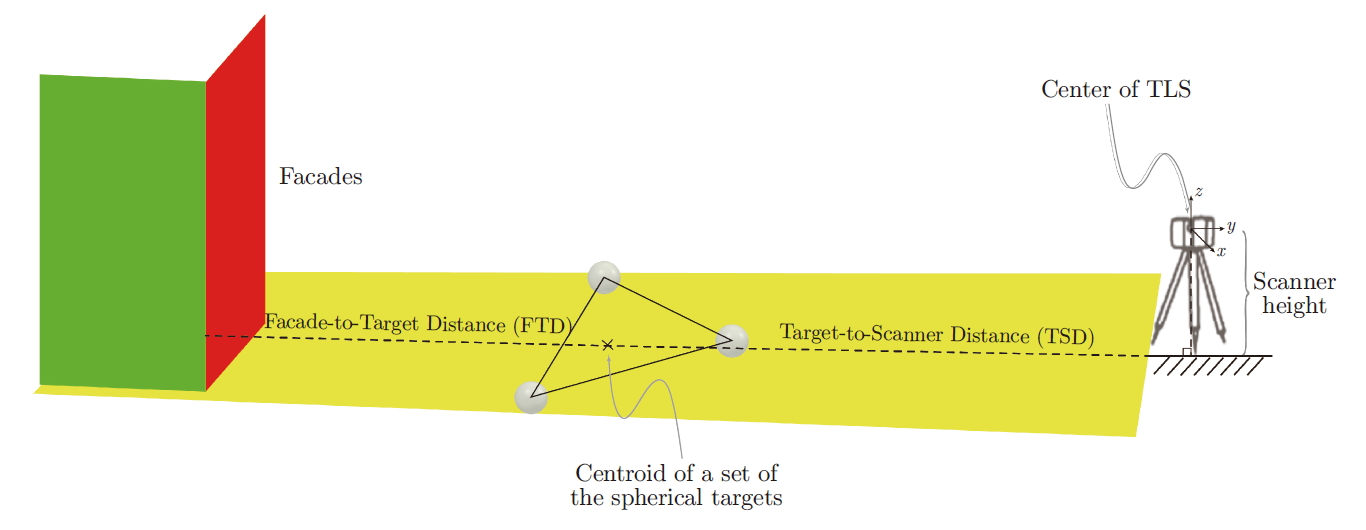
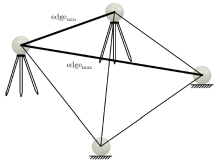
Figure 3
Maximum and minimum edges defined within the TIN formed by the spherical targets (illustrated by using four spheri- cal targets)"
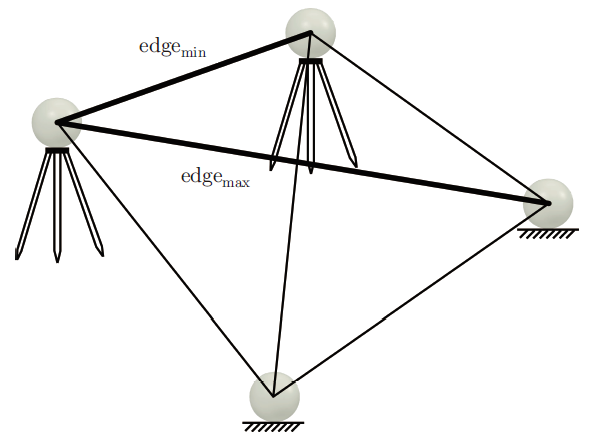
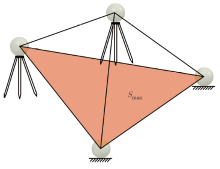
Figure 4
Maximum triangular surface (Smax) from the TIN formed by the estimated centers of the spherical targets (illustrated by us- ing four spherical targets)"
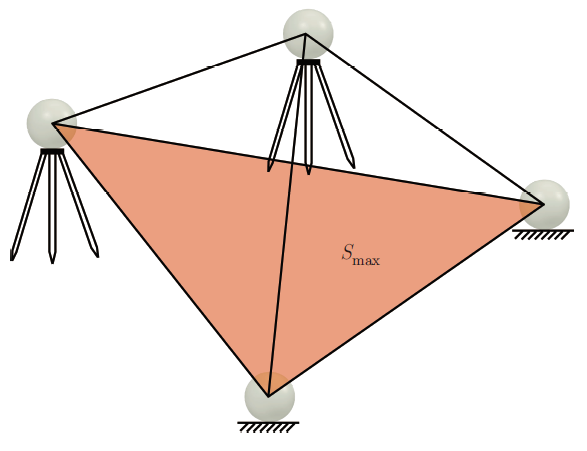
Table 1
Simulated registration (Cases A to E) for a large building"
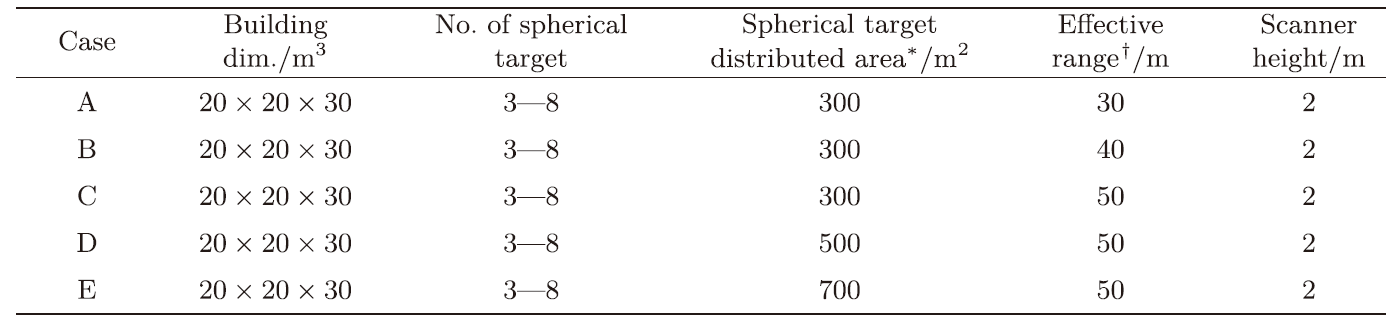 |
Table 2
Simulated registration (Cases F to J) for a small build"
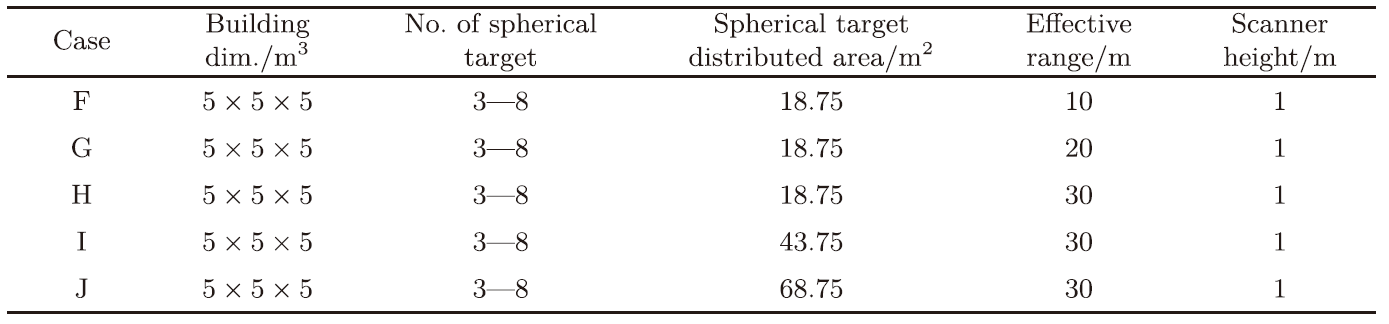 |
Figure 5
Two sites scanned with the Trimble SX10 scanner for verification of the simulation results"
Table 3
Details of registrations with real data collected in Sites 1 and 2"
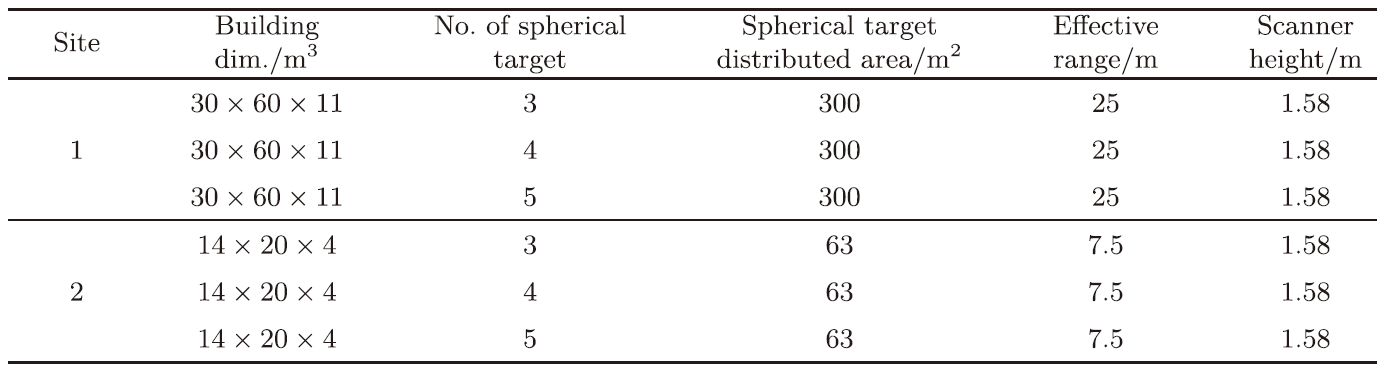 |
Table 4
Attributes computed for simulated registrations for Cases A, B and C"
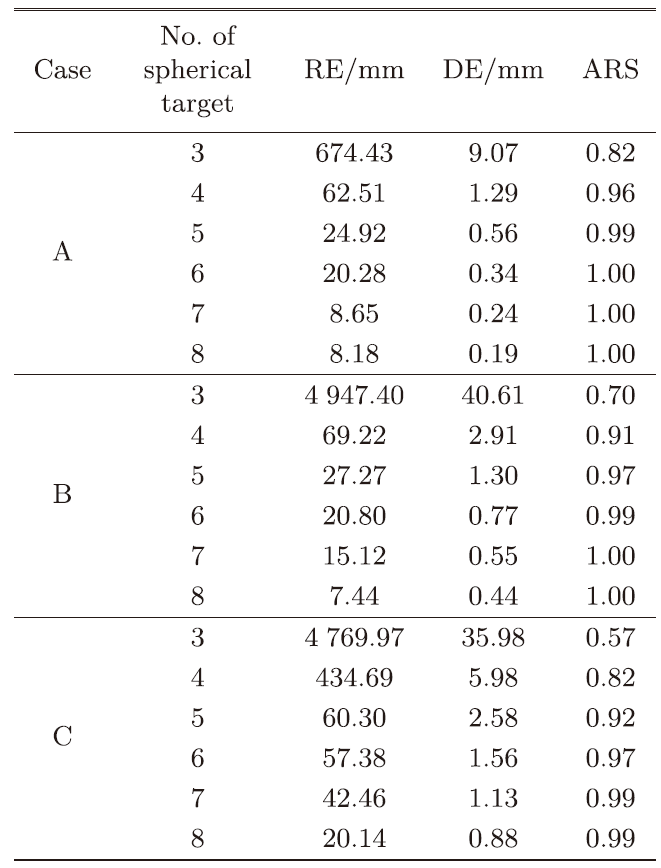 |
Table 5
Attributes computed for simulated registrations for Cases F,G, and H"
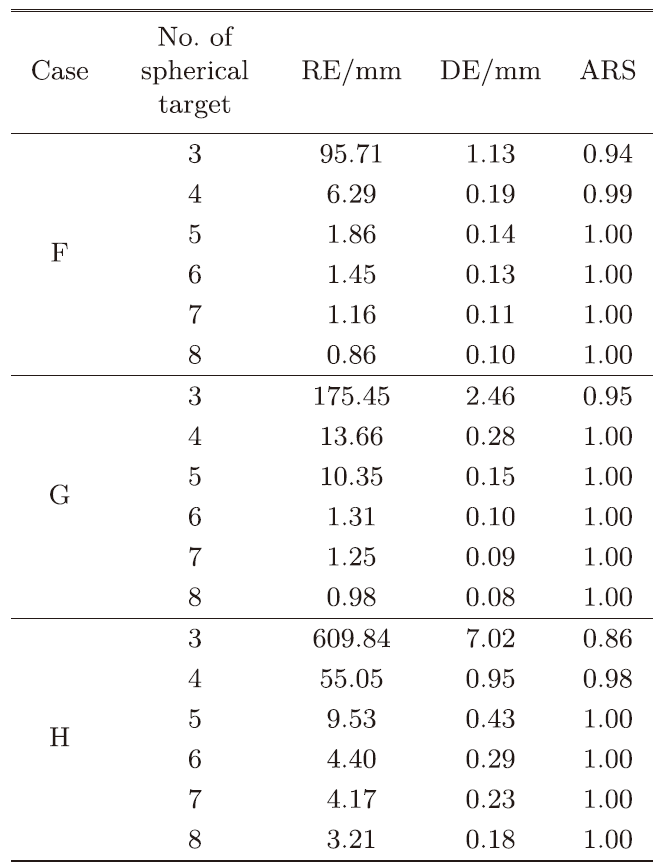 |
Table 6
Attributes computed for simulated registrations for Cases D and E"
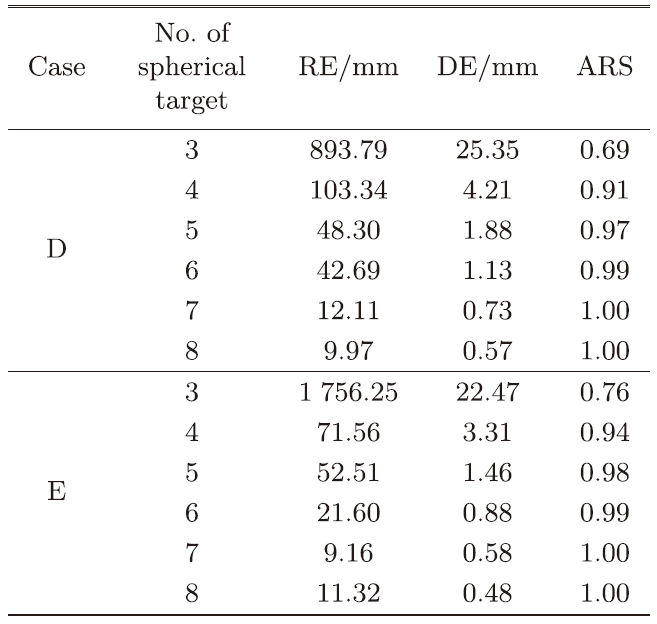 |
Table 7
Attributes computed for simulated registrations for Cases I and J"
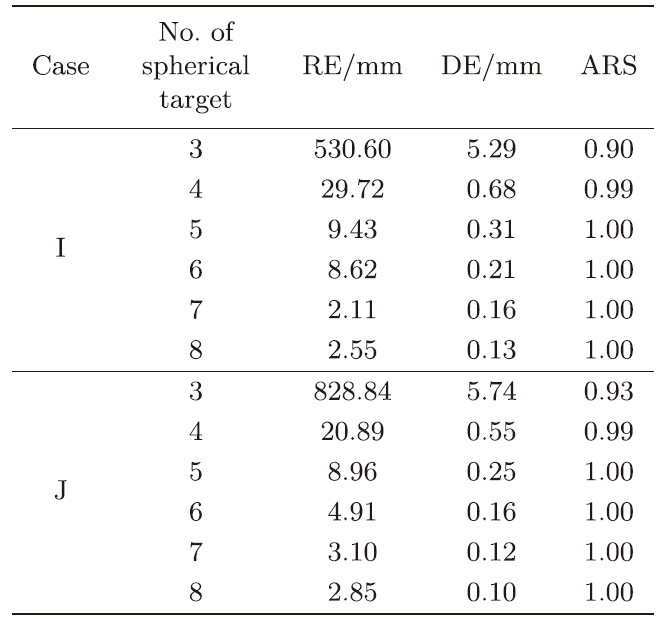 |

Figure 6
Average EoR versus FTD/TSD for the Simulation (Case E)"
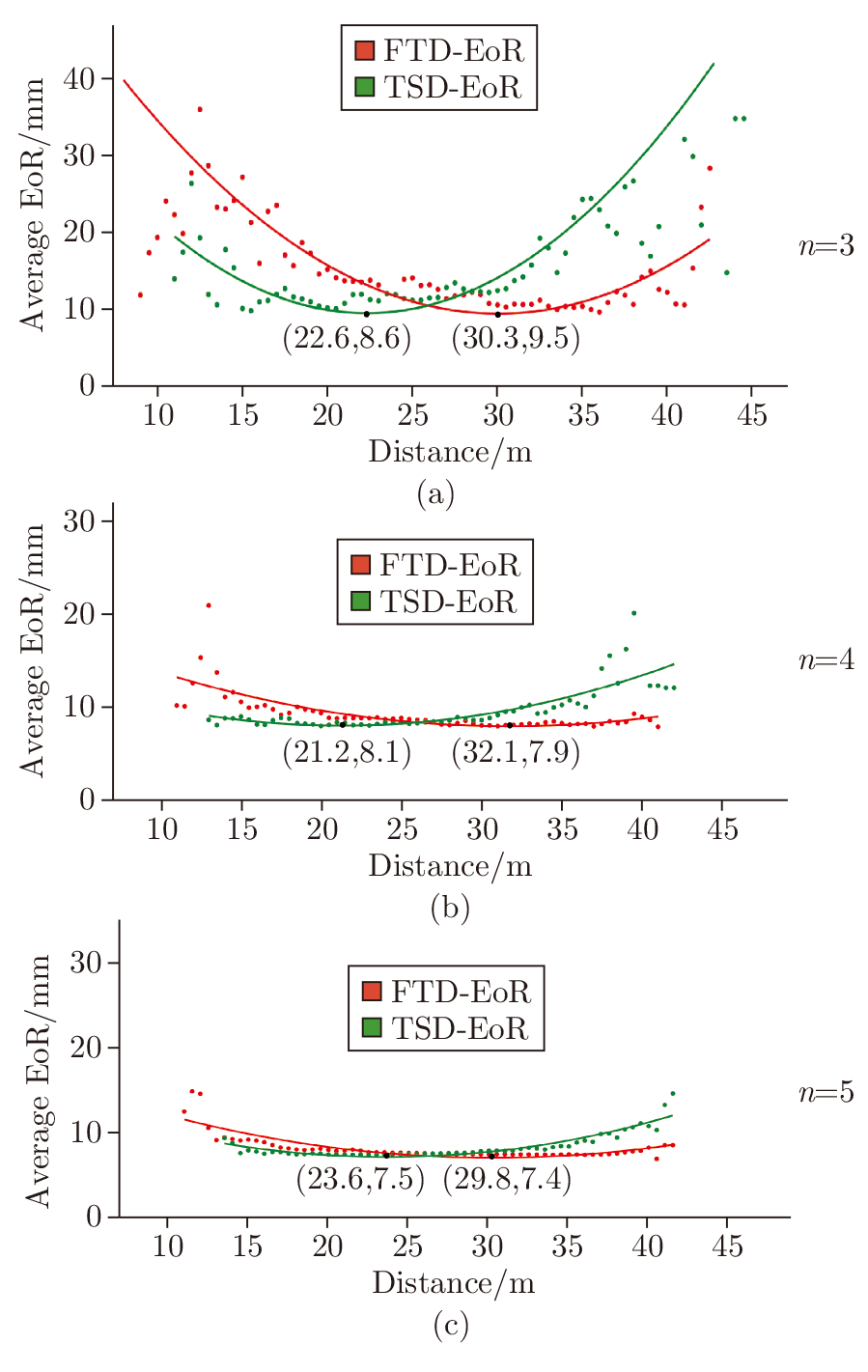
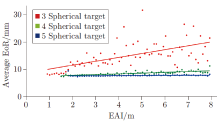
Figure 7
Average EoR versus EAI for the simula-tion (Case E)"
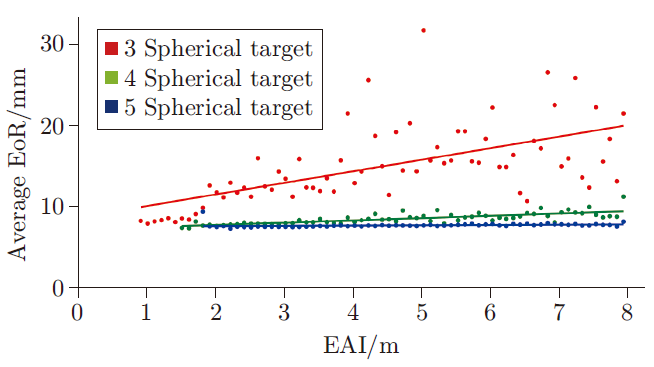
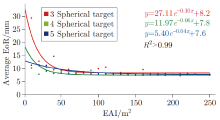
Figure 8
Average EoR versus AAI for the simula-tion (Case E)"
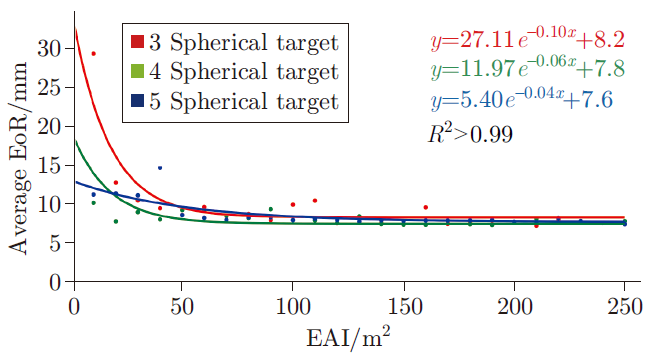
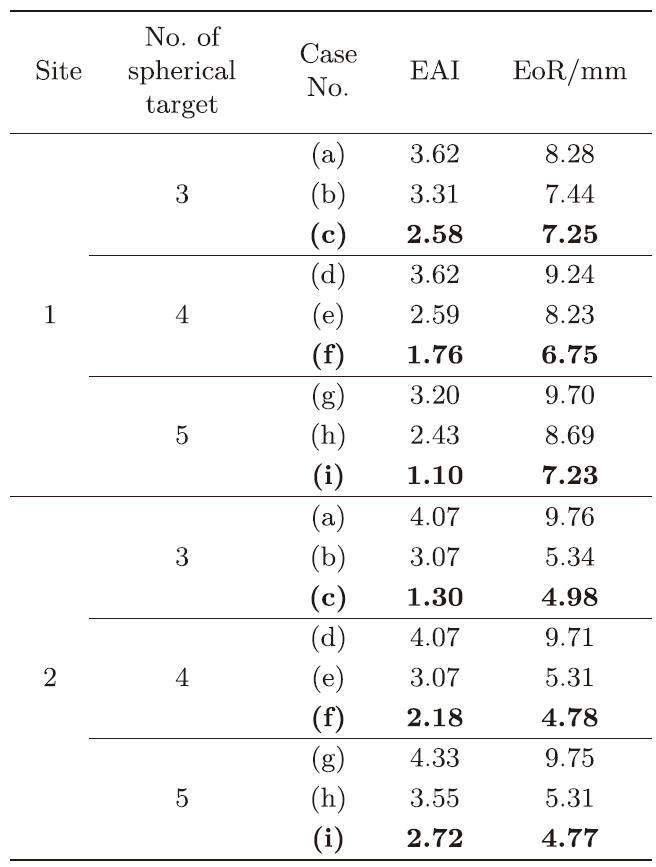
Table 8
Attributes computed for Dataset 1 (real data) for Sites 1 and 2"
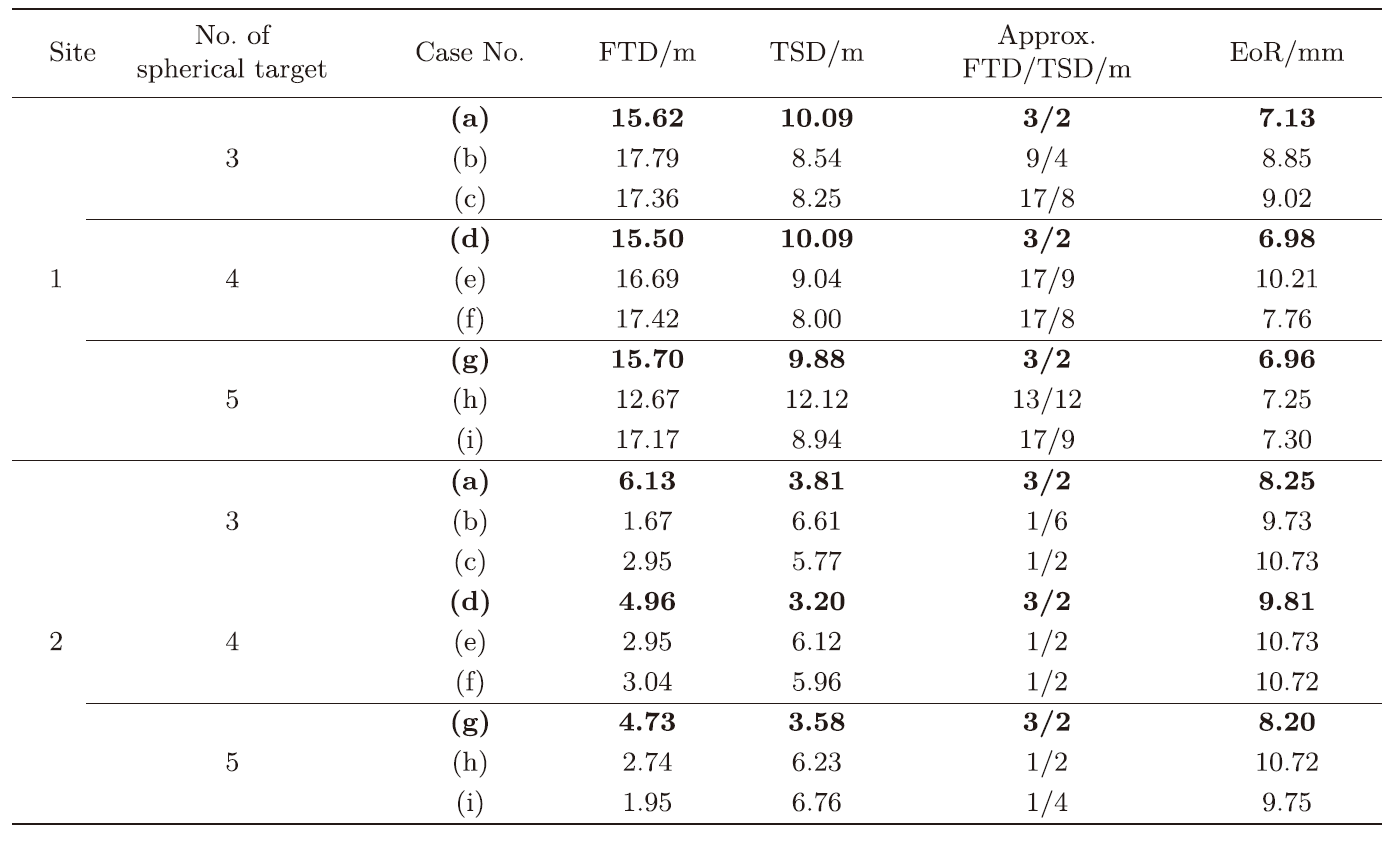 |
Figure 9
Top-down view of the point clouds and the spherical in Site 1 for Dataset 1 (Cases (a), (b), and (c) are registrations with three spherical targets; Cases (d), (e), and (f) are registrations with four spherical targets; Cases (g), (h), and (i) are registrations with five spherical targets)"
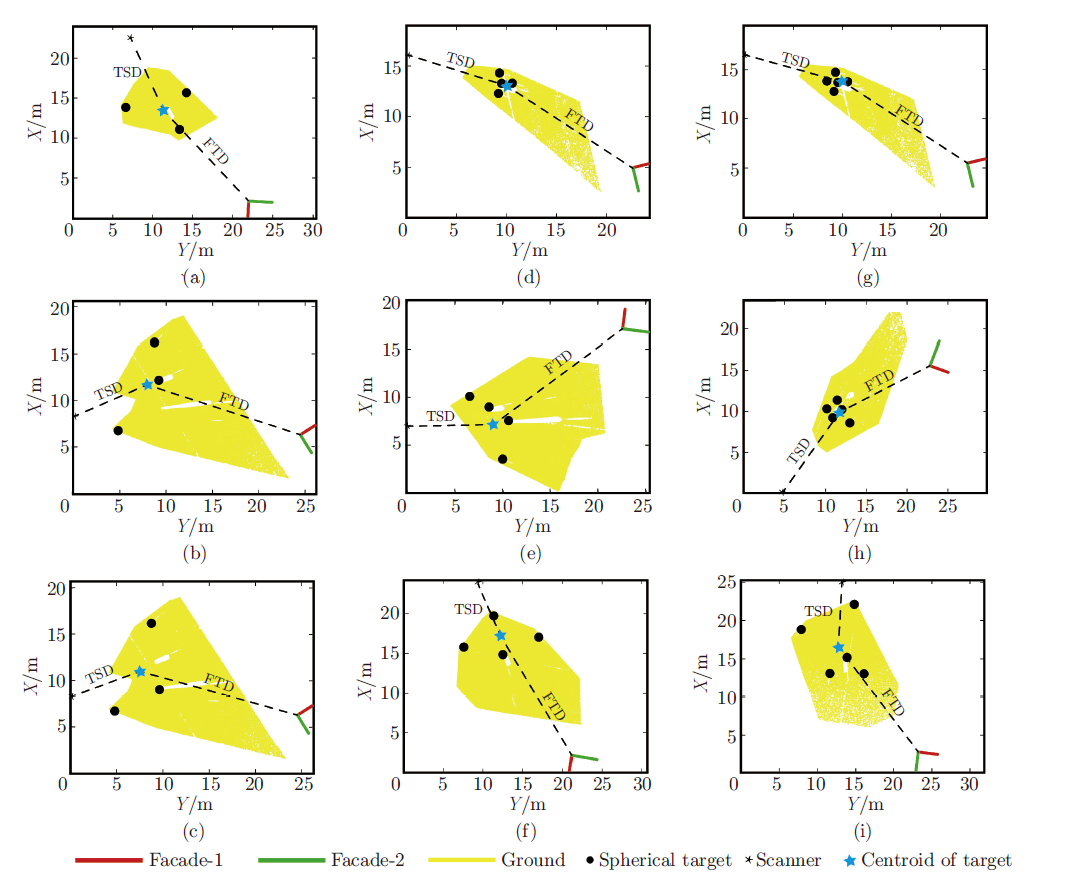
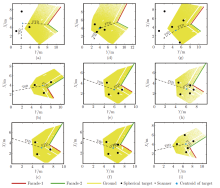
Figure 10
Top-down view of the point clouds and the spherical in Site 2 for Dataset 1 (Cases (a), (b), and (c) are registrations with three spherical targets; Cases (d), (e), and (f) are registrations with four spherical targets; Cases (g), (h), and (i) are registrations with five spherical targets)"

Table 9
Attributes computed for Dataset 2 (real data) for Sites 1 and 2"
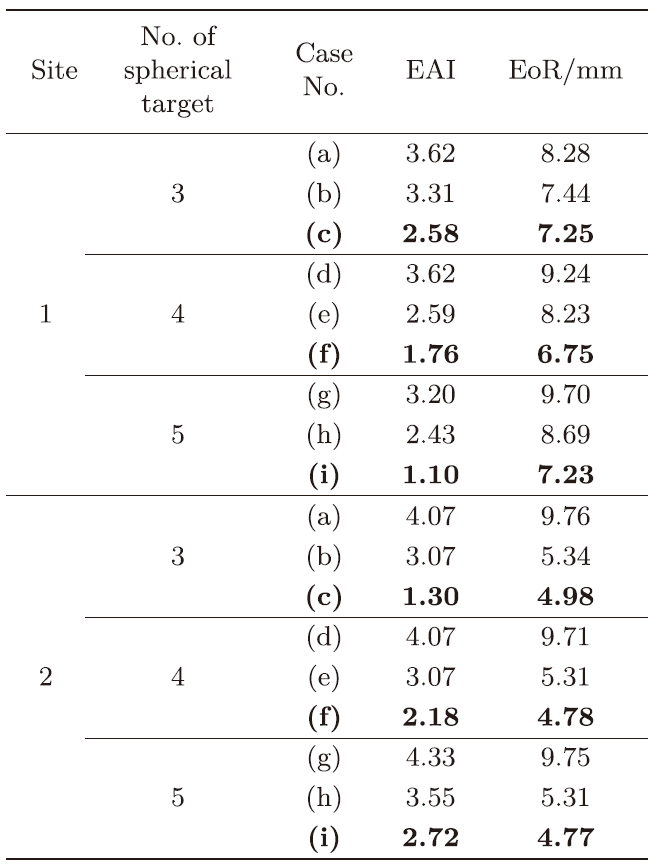 |
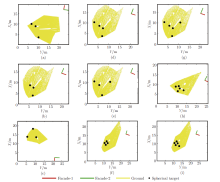
Figure 11
Top-down view of the point clouds and the spherical in Site 1 for Dataset 2 (Cases (a), (b), and (c) are registrations with three spherical targets; Cases (d), (e), and (f) are registrations with four spherical targets; Cases (g), (h), and (i) are registrations with five spherical targets)"
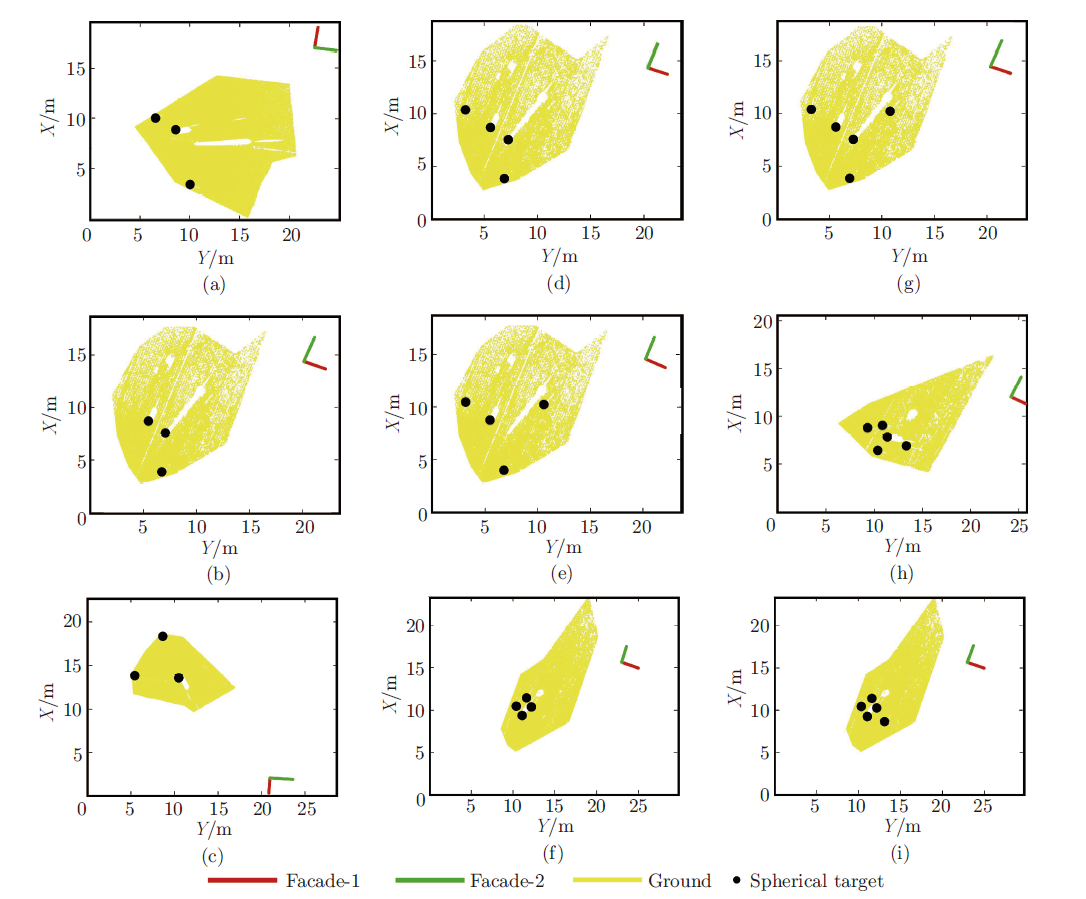
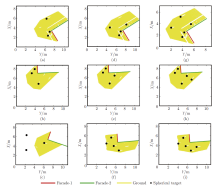
Figure 12
Top-down view of the point clouds and the spherical in Site 1 for Dataset 2 (Cases (a), (b), and (c) are registrations with three spherical targets; Cases (d), (e), and (f) are registrations with four spherical targets; Cases (g), (h), and (i) are registrations with five spherical targets)"
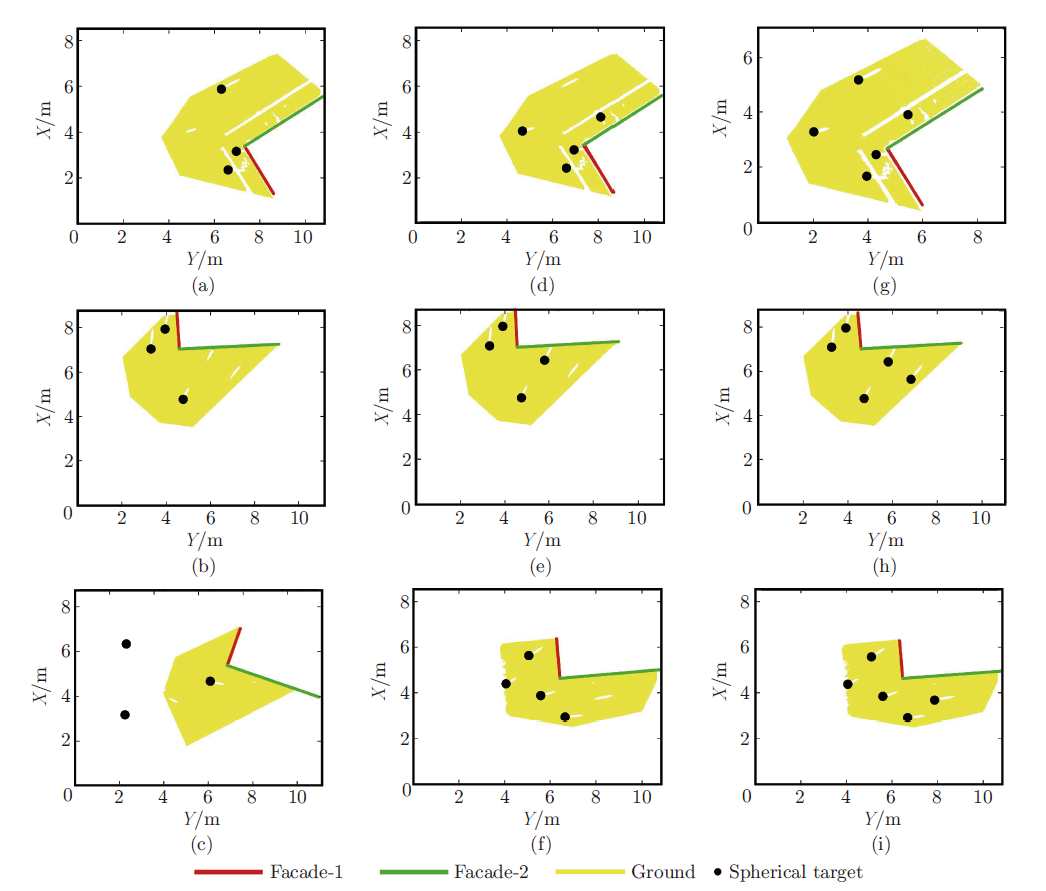
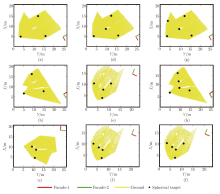
Figure 13
Top-down view of the point clouds and the spherical in Site 1 for Dataset 3 (Cases (a), (b), and (c) are registrations with three spherical targets; Cases (d), (e), and (f) are registrations with four spherical targets; Cases (g), (h), and (i) are registrations with five spherical targets)"
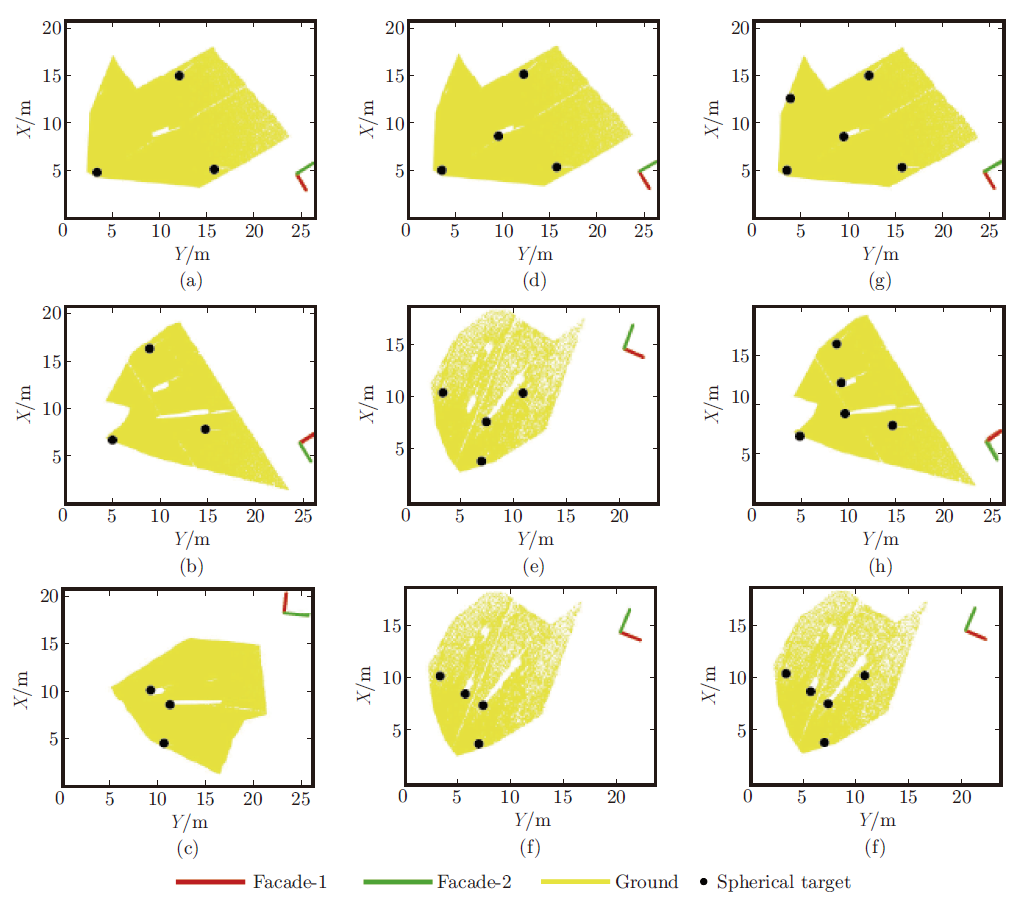
Figure 14
Top-down view of the point clouds and the spherical in Site 1 for Dataset 4 (Cases (a), (b), and (c) are registrations with three spherical targets; Cases (d), (e), and (f) are registrations with four spherical targets; Cases (g), (h), and (i) are registrations with five spherical targets)"
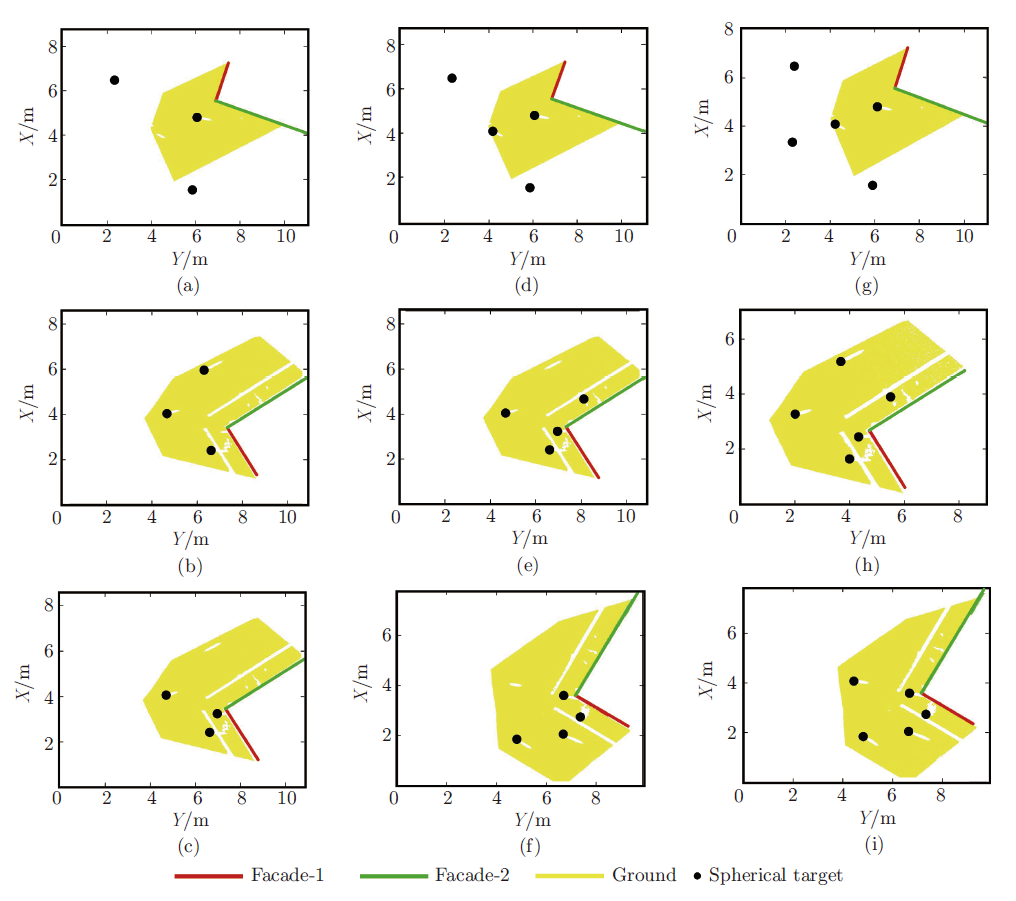
Table 10
Attributes computed for Dataset 3 (real data) for Sites 1 and 2"
 |
| [1] | VOSSELMAN G, MAAS H G. Airborne and terrestrial laser scanning[M]. Boca Raton: CRC Press, 2010. |
| [2] | WANG Yunbiao, XIAO Jun, LIU Lupeng, et al. Efficient rock mass point cloud registration based on local invariants[J]. Remote Sensing, 2021, 13(8): 1540. DOI: 10.3390/rs13081540. |
| [3] | SANCHEZ J, DENIS F, CHECCHIN P, et al. Global registration of 3D LiDAR point clouds based on scene features: application to structured environments[J]. Remote Sensing, 2017, 9(10): 1014. DOI: 10.3390/rs9101014. |
| [4] | XIONG Biao, JIANG Weize, LI Dengke, et al. Voxel grid-based fast registration of terrestrial point cloud[J]. Remote Sensing, 2021, 13(10): 1905. DOI: 10.3390/rs13101905. |
| [5] | YANG Bisheng, ZANG Yufu. Automated registration of dense terrestrial laser-scanning point clouds using curves[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 95: 109-121. DOI: 10.1016/j.isprsjprs.2014.05.012. |
| [6] | TAO Wuyong, HUA Xianghong, CHEN Zhiping, et al. Fast and automatic registration of terrestrial point clouds using 2D line features[J]. Remote Sensing, 2020, 12(8): 1283. DOI: 10.3390/rs12081283. |
| [7] | ZHANG Wuming, CHEN Yiming, WANG Hongtao, et al. Efficient registration of terrestrial LiDAR scans using a coarse-to-fine strategy for forestry applications[J]. Agricultural and Forest Meteorology, 2016, 225: 8-23. DOI: 10.1016/j.agrformet.2016.05.005. |
| [8] | SHAO Jie, ZHANG Wuming, MELLADO N, et al. Automated markerless registration of point clouds from TLS and structured light scanner for heritage documentation[J]. Journal of Cultural Heritage, 2019, 35: 16-24. DOI: 10.1016/j.culher.2018.07.013. |
| [9] | BOSCHÉ F. Plane-based registration of construction laser scans with 3D/4D building models[J]. Advanced Engineering Informatics, 2012, 26(1): 90-102. DOI: 10.1016/j.aei.2011.08.009. |
| [10] | WUJANZ D, SCHALLER S, GIELSDORF F, et al. Plane-based registration of several thousand laser scans on standard hardware[C]// Proceedings of International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Riva del Garda: ISPRS, 2018: 1207-1212. DOI: 10.5194/isprs-archives-XLII-2-1207-2018. |
| [11] | CHAN T O, LICHTI D D, BELTON D, et al. Automatic point cloud registration using a single octagonal lamp pole[J]. Photogrammetric Engineering & Remote Sensing, 2016, 82(4): 257-269. DOI: 10.14358/PERS.82.4.257. |
| [12] | RABBANI T, DIJKMAN S, VAN DEN HEUVEL F, et al. An integrated approach for modelling and global registration of point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2007, 61(6): 355-370. DOI: 10.1016/j.isprsjprs.2006.09.006. |
| [13] | MORITANI R, KANAI S, DATE H, et al. Cylinder-based simultaneous registration and model fitting of laser-scanned point clouds for accurate as-built modeling of piping system[J]. Computer-Aided Design & Applications, 2018, 15(5): 720-733. DOI: 10.1080/16864360.2018.1441239. |
| [14] | CloudCompare. CloudCompare[CP/OL].[2024-12-11]. https://www.cloudcompare.org/. |
| [15] | Trimble. Trimble business center[CP/OL]. [2024-12-11]. https://geospatial.trimble.com/products-and-solutions/trimble-business-center. |
| [16] | Leica. Leica cyclone[CP/OL]. [2024-12-11]. https://leica-geosystems.com/products/laser-scanners/software/leica-cyclone. |
| [17] | PESCI A, TEZA G. Terrestrial laser scanner and retro‐reflective targets: an experiment for anomalous effects investigation[J]. International Journal of Remote Sensing, 2008, 29(19): 5749-5765. DOI: 10.1080/01431160802108489. |
| [18] | TAM G K L, CHENG Z Q, LAI Y K, et al. Registration of 3D point clouds and meshes: a survey from rigid to nonrigid[J]. IEEE Transactions on Visualization and Computer Graphics, 2013, 19(7): 1199-1217. DOI: 10.1109/TVCG.2012.310. |
| [19] | FISHMAN G. Monte Carlo: concepts, algorithms, and applications[M]. [S.l.]: Springer Science & Business Media, 2013. |
| [20] | LIU Yiqun, YANG Chao, LIU Fangfang, et al. 623 Tflop/s HPCG run on Tianhe-2: leveraging millions of hybrid cores[J]. The International Journal of High Performance Computing Applications, 2016, 30(1): 39-54. DOI: 10.1177/1094342015616266. |
| [21] | WANG Yanmin, SHI Hongbin, ZHANG Yanyan, et al. Automatic registration of laser point cloud using precisely located sphere targets[J]. Journal of Applied Remote Sensing, 2014, 8(1): 083588. DOI: 10.1117/1.JRS.8.083588. |
| [22] | ZHANG Mengmi. Accurate sphere marker-based registration system of 3D point cloud data in applications of shipbuilding blocks[J]. Journal of Industrial and Intelligent Information, 2015, 3(4): 318-323. DOI: 10.12720/jiii.3.4.318-323. |
| [23] | YUN D, KIM S, HEO H, et al. Automated registration of multi-view point clouds using sphere targets[J]. Advanced Engineering Informatics, 2015, 29(4): 930-939. DOI: 10.1016/j.aei.2015.09.008. |
| [24] | HUANG Junhui, WANG Zhao, GAO Jianmin, et al. High-precision registration of point clouds based on sphere feature constraints[J]. Sensors, 2017, 17(1): 72. DOI: 10.3390/s17010072. |
| [25] | BRETAGNE E, DASSONVALLE P, CARON G. Spherical target-based calibration of terrestrial laser scanner intensity. Application to colour information computation[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2018, 144: 14-27. DOI: 10.1016/j.isprsjprs.2018.06.014. |
| [26] | BECERIK-GERBER B, JAZIZADEH F, KA-VULYA G, et al. Assessment of target types and layouts in 3D laser scanning for registration accuracy[J]. Automation in Construction, 2011, 20(5): 649-658. DOI: 10.1016/j.autcon.2010.12.008. |
| [27] | FRANASZEK M, CHEOK G S, WITZGALL C. Fast automatic registration of range images from 3D imaging systems using sphere targets[J]. Automation in Construction, 2009, 18(3): 265-274. DOI: 10.1016/j.autcon.2008.08.003. |
| [28] | GÜMÜŞ K, GÜMÜŞ M G, ERKAYA H. A statistical evaluation of registration methods used in terrestrial laser scanning in cultural heritage applications[J]. Mediterranean Archaeology and Archaeometry, 2017, 17(3): 53-64. DOI: 10.5281/zenodo.1005465. |
| [29] | RACHAKONDA P, MURALIKRISHNAN B, COURNOYER L, et al. Methods and considerations to determine sphere center from terrestrial laser scanner point cloud data[J]. Measurement Science and Technology, 2017, 28(10): 105001. DOI: 10.1088/1361-6501/aa8011. |
| [30] | MURALIKRISHNAN B, RACHAKONDA P, LEE V, et al. Relative range error evaluation of terrestrial laser scanners using a plate, a sphere, and a novel dual-sphere-plate target[J]. Measurement, 2017, 111: 60-68. DOI: 10.1016/j.measurement.2017.07.027. |
| [31] | LENDA G, MARMOL U, BUCZEK M. The effect of partial transparency of spherical targets on TLS point clouds registration accuracy[J]. KSCE Journal of Civil Engineering, 2018, 22(7): 2538-2548. DOI: 10.1007/s12205-017-1907-9. |
| [32] | JIA Fengman, LICHTI D D. A model-based design system for terrestrial laser scanning networks in complex sites[J]. Remote Sensing, 2019, 11(15): 1749. DOI: 10.3390/rs11151749. |
| [33] | QIN Zheng, YU Hao, WANG Changiian, et al. Geometric transformer for fast and robust point cloud registration[C]// Proceedings of 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. New Orleans, LA: IEEE, 2022: 11133-11142. DOI: 10.1109/CVPR52688.2022.01086. |
| [34] | BAI Xuyang, LUO Zixin, ZHOU Lei, et al. PointDSC: robust point cloud registration using deep spatial consistency[C]// Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Nashville, TN: IEEE, 2021: 15854-15864. DOI: 10.1109/CVPR46437.2021.01560. |
| [35] |
KADAM P, ZHANG Min, LIU Shan, et al. R-pointhop: a green, accurate, and unsupervised point cloud registration method[J]. IEEE Transactions on Image Processing, 2022, 31: 2710-2725. DOI: 10.1109/TIP.2022.3160609.
pmid: 35324441 |
| [36] | FU Kexue, LIU Shaolei, LUO Xiaoyuan, et al. Robust point cloud registration framework based on deep graph matching[C]// Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Nashville, TN: IEEE, 2021: 8889-8898. DOI: 10.1109/CVPR46437.2021.00878. |
| [37] | ZHANG Zhiyuan, SUN Jiadai, DAI Yuchao, et al. Self-supervised rigid transformation equivariance for accurate 3D point cloud registration[J]. Pattern Recognition, 2022, 130: 108784. DOI: 10.1016/j.patcog.2022.108784. |
| [38] | LICHTI D D. Error modelling, calibration and analysis of an AM-CW terrestrial laser scanner system[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2007, 61(5): 307-324. DOI: 10.1016/j.isprsjprs.2006.10.004. |
| [39] | CHAN T O, LICHTI D D, BELTON D. A rigorous cylinder-based self-calibration approach for terrestrial laser scanners[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 99: 84-99. DOI: 10.1016/j.isprsjprs.2014.11.003. |
| [40] | LICHTI D D. A method to test differences between additional parameter sets with a case study in terrestrial laser scanner self-calibration stability analysis[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2008, 63(2): 169-180. DOI: 10.1016/j.isprsjprs.2007.08.001. |
| [41] | BAE K H, LICHTI D D. A method for automated registration of unorganised point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2008, 63(1): 36-54. DOI: 10.1016/j.isprsjprs.2007.05.012. |
| [42] | BESL P J, MCKAY N D. Method for registration of 3-D shapes[C]//Proceedings of the SPIE 1611, Sensor Fusion IV:Control Paradigms and Data Structures. Boston, MA: SPIE, 1992: 586-606. DOI: 10.1117/12.57955. |
| [43] | HORN B K P. Closed-form solution of absolute orientation using unit quaternions[J]. Journal of the Optical Society of America A, 1987, 4(4): 629-642. DOI: 10.1364/JOSAA.4.000629. |
| [44] | PROKOP M, SHAIKH S A, KIM K S. Low overlapping point cloud registration using line features detection[J]. Remote Sensing, 2019, 12(1): 61. DOI: 10.3390/rs12010061. |
| [45] | MOSEGAARD K, SAMBRIDGE M. Monte Carlo analysis of inverse problems[J]. Inverse Problems, 2002, 18(3): R29-R54. DOI: 10.1088/0266-5611/18/3/201. |
| [46] | GORTE B, LESPARRE J. Representation and reconstruction of triangular irregular networks with vertical walls[C]// Proceedings of the 7th International Conference on 3D Geoinformation. Quebec, Canada: International Society of Photogrammetry and Remote Sensing, 2012. DOI: 10.5194/isprsarchives-XXXVIII-4-C26-15-2012. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||